Circuits de commande du moteur en fonction de la vitesse
 En commande moteur, la vitesse est surveillée en fonction de la vitesse du rotor du moteur pour influencer les éléments de commande correspondants lors de son évolution.
En commande moteur, la vitesse est surveillée en fonction de la vitesse du rotor du moteur pour influencer les éléments de commande correspondants lors de son évolution.
Des relais de contrôle de vitesse ou de petits générateurs électriques de mesure peuvent être utilisés dans les circuits de commande de démarrage de moteur. Cependant, ils sont extrêmement rarement utilisés à ces fins en raison de la complexité de la conception, du coût élevé et de la fiabilité insuffisante. Par conséquent, la vitesse du moteur est contrôlée par des méthodes indirectes. Dans les moteurs asynchrones et synchrones, la fréquence de rotation est contrôlée par la force électromotrice et la fréquence du courant du rotor, et dans les moteurs à courant continu par la force électromotrice de l'induit.
En figue. 1, a et b montrent des schémas de démarrage automatique d'un moteur à courant continu à excitation parallèle en fonction de la fréquence de rotation et en fonction de la FEM et de la tension d'induit à partir du moment du démarrage. Le contrôle de la fréquence de rotation s'effectue en mesurant la FEM du moteur, qui varie proportionnellement à la fréquence de rotation.
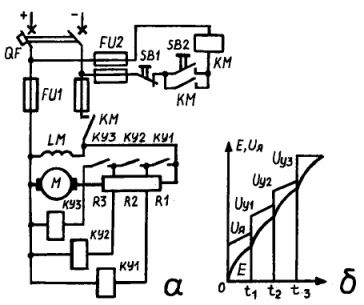
Riz. 1.Circuits de commande en fonction de la vitesse: a et b - schéma de circuit et de démarrage d'un moteur à courant continu à excitation parallèle
Étant donné que la FEM est proportionnelle au régime du moteur, l'entrée automatique des étages individuels du rhéostat de démarrage est effectuée à une certaine amplitude de la tension d'actionnement des contacteurs d'accélération KM1, KM2 et KMZ, chacun étant réglé sur une certaine rétraction valeur. En appuyant sur le démarreur boutons SB2 active le contacteur de ligne KM. Toutes les résistances R1, R2, R3 seront connectées en série avec l'enroulement d'induit et limiteront le courant.
A une certaine vitesse n1, la tension Uy1 de la bobine du contacteur K1 est

où Voici le coefficient de la machine.
Lorsque Uy1 sera égale à la tension d'abaissement, le contacteur KM1 fonctionnera et court-circuitera la résistance R1. Une nouvelle augmentation de la vitesse de rotation jusqu'à la rotation de n2 et n3 entraînera une augmentation de la tension sur les bobines des contacteurs K2 et un court-circuit aux valeurs


Dans ce cas, les contacteurs K2 et le court-circuit vont travailler en série et court-circuiter les résistances R2 et R3. Après avoir court-circuité la résistance R3, le processus de démarrage sera terminé et le moteur pourra fonctionner longtemps.
La FEM dans le circuit du rotor du moteur à induction est proportionnelle au glissement, c'est-à-dire E2s = E2s. Ici E2 est la fem d'un rotor stationnaire.
Plus le glissement est faible, plus la FEM est faible, c'est-à-dire plus la vitesse du rotor du moteur est élevée. Pour contrôler le démarrage des moteurs à courant alternatif avec un rotor bobiné, des relais sont utilisés qui contrôlent la valeur de la FEM dans le circuit du rotor.Les dispositifs correspondants (relais, contacteurs) qui court-circuitent les résistances de démarrage sont ajustés à ces tensions.
Pour le contrôle des moteurs à induction à rotor bobiné et des moteurs synchrones, la méthode de la fréquence peut également être utilisée en fonction de la vitesse. Cette méthode est basée sur la dépendance connue de la fréquence du courant de rotor f2 sur la fréquence de rotation du champ de stator n0 et du rotor n2, c'est-à-dire
Étant donné que chaque vitesse de rotor correspond à une certaine valeur f2, un relais réglé sur cette fréquence et connecté au circuit du rotor du moteur agira sur le circuit de la bobine du contacteur. Le contacteur court-circuitera les étages de résistance à une vitesse donnée.
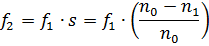
Le freinage par moteurs opposés se fait en fonction de la vitesse relais de contrôle de vitesse SR. Sur la Fig. 2, a, b montrent des exemples d'arrêt de moteurs asynchrones par opposition.
Riz. 2. Schémas d'arrêt des moteurs asynchrones par opposition : a — irréversible ; b - réversible
Voyons comment fonctionnent ces schémas.
L'appui sur le bouton SB2 active la bobine du contacteur KM (voir Fig. 2, a), qui ferme les contacts de puissance et bloque le bouton SB2. Dans le même temps, le contact du bloc d'ouverture KM dans le circuit de la bobine du contacteur de frein KM1 et le relais de contrôle de vitesse SR les déconnectent du réseau. Lorsque le rotor du moteur atteint une certaine vitesse, le contact SR va se fermer, mais cela ne fera plus fonctionner le contacteur KM1. Le moteur continue de tourner normalement.
L'arrêt du moteur avec un frein à contre-commutation se fait en appuyant sur le bouton SB.Dans le même temps, la bobine du contacteur KM est neutralisée, ses contacts principaux disparaissent et déconnectent le moteur du réseau. Le contact d'ouverture KM dans le circuit du contacteur de frein de KM1 se fermera. Puisqu'à ce moment le contact du relais de contrôle de vitesse SR est fermé, les contacts principaux du contacteur de frein sont immédiatement activés et l'enroulement du stator est commuté en sens inverse, le champ magnétique commencera à tourner dans le sens opposé, c'est-à-dire la rotation du rotor et du moteur sera arrêtée par une commutation de compteur. La vitesse du rotor diminue et à une certaine petite valeur, ses contacts du relais de contrôle de vitesse RKS s'ouvrent et déconnectent le moteur du secteur.
Dans le cas d'une commande en marche arrière avec freinage opposé (Fig. 2, b), le moteur est démarré en marche avant en appuyant sur le bouton SB1 qui, en fermant le circuit de la bobine du contacteur KM1, assure que le moteur est connecté au réseau. Le rotor du moteur commencera à tourner et lorsqu'il atteindra une certaine vitesse, le contact de fermeture SR1 du relais de contrôle de vitesse se fermera et le contact d'ouverture SR2 s'ouvrira.
La mise sous tension de la bobine du contacteur KM2 ne se produira pas car le contact d'ouverture du contacteur KM1 a rompu son circuit. Dans cette position, le moteur continuera de tourner jusqu'à ce que le bouton SB soit enfoncé. Lorsque le bouton SB est enfoncé, le circuit de la bobine KM1 est désactivé. Cela fermera le contact de repos KM1 et le circuit de bobine du contacteur KM2 sera alimenté.
L'enroulement du stator du moteur s'engagera en marche arrière. Comme le rotor continue à tourner dans le même sens par inertie, un freinage d'opposition se produit.Lorsque la vitesse diminue jusqu'à une certaine petite valeur, le relais de contrôle de vitesse ouvre son contact SR1, le contacteur KM2 s'éteint et déconnecte le moteur du réseau.
Pour démarrer le moteur en marche arrière, appuyez sur le bouton SB2. L'ensemble du processus sera similaire à celui décrit. Maintenant, le rôle du contacteur de frein est joué par le contacteur KM1, et les contacts SR2 du relais de contrôle de vitesse contrôleront le processus de freinage.
Le démarrage automatique d'un moteur synchrone est associé à des difficultés bien connues, car dans ce cas, il est nécessaire non seulement de limiter le courant de démarrage, mais également de synchroniser la machine avec le réseau.
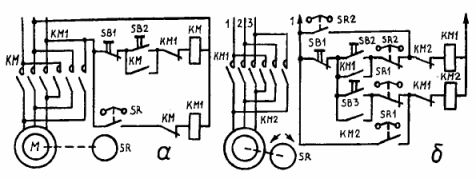
Le circuit de commande d'un moteur synchrone de faible puissance est illustré à la Fig. 3. La limitation du courant d'appel est assurée par des résistances actives incluses dans l'enroulement du stator. Avant de démarrer le moteur, activez les interrupteurs d'entrée automatiques QF et QF1 des réseaux AC et DC, qui assurent une protection maximale et thermique. En appuyant sur le bouton de démarrage SB2, la bobine du contacteur KM est activée et l'enroulement du stator du moteur synchrone via les contacts principaux de KM est connecté au réseau via les résistances de démarrage Rn. La bobine est autobloquante et son contact dans le circuit continu comprend le relais de verrouillage KV, dont le contact de fermeture, en se fermant, prépare les bobines des contacteurs K1 et K2 à l'enclenchement.
Les relais de fréquence KF1 et KF2 du circuit d'excitation du rotor LM fonctionnent en fonction du régime moteur Au démarrage, lorsque le patinage rotor est le plus important, les contacts de coupure des relais KF1 et KF2 s'ouvrent.L'ouverture des bobines se produit avant que le relais de blocage KV ne s'enclenche et la bobine K1 ne sera pas alimentée. Les contacts de relais KF1 et KF2 se referment lorsque le régime moteur atteint environ 60-95 % de manière synchrone conformément à la régulation du relais.
Après avoir fermé les contacts du relais KF1, la bobine du contacteur K1 s'allumera, ses contacts dans le circuit principal court-circuiteront les résistances de démarrage Rp et le stator s'allumera à pleine tension de ligne. Lorsque les contacts ouverts du relais KF2 sont fermés, un circuit est créé pour alimenter la bobine du contacteur K2, indépendamment du contacteur K1, son contact s'ouvre à une vitesse d'environ 60% de la vitesse synchrone.
Le contacteur K2 a deux enroulements : un principal, tirant KM1 et le deuxième enroulement KM2, destiné à libérer le verrou, qui est fourni avec le contacteur. Après la mise sous tension de la bobine réceptrice KM1, les contacts de fermeture K2 se ferment dans le circuit d'excitation et les contacts d'ouverture K2 s'ouvrent, déconnectant l'enroulement du rotor des résistances de décharge R1 et R2 et connectant le rotor au réseau CC.
Riz. 3. Schéma de contrôle du moteur synchrone
Les contacts du contacteur K2 fonctionnent dans l'ordre suivant. Le contact N / O K2 s'ouvre dans le circuit d'alimentation de la bobine de détection, mais l'action de blocage maintient le contacteur sous tension. Les contacts de fermeture K2 se ferment dans le circuit d'alimentation des deux bobines et dans le circuit de la bobine KM2, préparant le circuit pour une mise sous tension ultérieure. La bobine K2 sera désexcitée dès que le mécanisme de verrouillage est libéré de la bobine KM2. Le moteur est déconnecté du secteur en appuyant sur le bouton SB1.La bobine K1 libère son contact d'ouverture dans le circuit de la bobine KM2, qui libère le verrou et désactive la bobine KM1, après quoi le circuit revient à sa position d'origine.