Exemples de schémas d'entraînement électrique pour mécanismes de types centrifuges et alternatifs
 En figue. La figure 1a montre un schéma technologique des pompes d'une installation de drainage minier destinée à pomper les eaux souterraines des talons de puits et des fronts enterrés. L'installation comprend deux pompes 1H et 2H avec des réservoirs de remplissage 1B et 2B, qui assurent une charge constante des pompes.
En figue. La figure 1a montre un schéma technologique des pompes d'une installation de drainage minier destinée à pomper les eaux souterraines des talons de puits et des fronts enterrés. L'installation comprend deux pompes 1H et 2H avec des réservoirs de remplissage 1B et 2B, qui assurent une charge constante des pompes.
Les pompes sont entraînées en rotation par des moteurs asynchrones à écureuils 1D et 2D, qui pour une plus grande fiabilité sont connectés à différentes sections de bus de la sous-station d'abaissement (Fig. 1, b). Si le niveau d'eau dans la fosse est inférieur au niveau de travail, les pompes ne pompent pas l'eau. Lorsque l'eau dépasse le niveau de travail, l'une des pompes est mise en marche. Lorsque le niveau d'eau dépasse le niveau d'urgence, une deuxième pompe de secours est connectée au travail.
Schème mouvement alimenté par l'électricité permet différentes commandes des moteurs de pompe :
• automatiquement en fonction du niveau d'eau dans la fosse,
• à distance (depuis la salle de contrôle),
• village local boutons de commandesitué directement aux pompes.
La sélection automatique de l'AU et de la télécommande se fait via les commutateurs universels 1UP et 2UP. Les interrupteurs 1PP et 2PP vous permettent de sélectionner une méthode de contrôle pour chaque moteur : télécommande et local à l'aide des boutons 1KU et 2KU. Le commutateur logiciel permet une usure uniforme de l'équipement pour utiliser alternativement des moteurs 1D et 2D comme moteur en marche.
Démarrage automatique du moteur la pompe de travail est mise en œuvre à l'aide d'un interrupteur à flotteur 1PR, qui contrôle le niveau d'eau de travail. Le moteur de la pompe de secours est activé par le relais à flotteur 2PR, qui contrôle le niveau d'urgence.
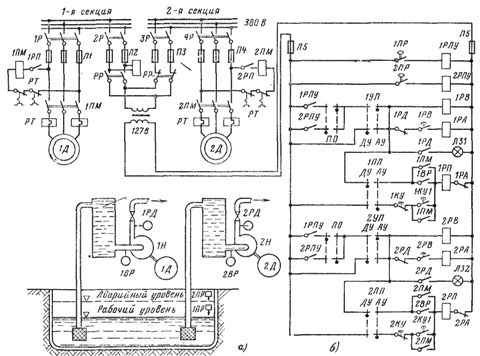
Riz. 1. Installation d'assèchement (a) et circuit électrique (b).
Si après la temporisation du relais 1PB ou 2PB la pompe ne crée pas la pression requise, le moteur est déconnecté du réseau. Le moteur ne démarrera pas même si la pompe n'est pas complètement remplie d'eau (niveau d'eau insuffisant dans le réservoir de remplissage et les contacts du relais de commande de remplissage 1BP ou 2BP sont ouverts).
En figue. La figure 2 montre un schéma d'un entraînement électrique automatisé d'un compresseur alternatif. Le moteur du compresseur asynchrone peut être démarré depuis le site d'installation du compresseur à l'aide du bouton 2KP, ainsi que depuis la salle de contrôle à l'aide du bouton 1KP. L'autorisation de démarrage est donnée via le relais 2RP si la pression dans le récepteur d'air (récepteur) est inférieure à la normale. Dans ce cas, le contact de fermeture du pressostat 1RP dans le circuit du relais 2RP se ferme, la bobine du relais 2RP fait passer le courant et le contact de fermeture 2RP dans le circuit du contacteur de la ligne KL se ferme.
Après la mise sous tension du contacteur KL, la bobine de la vanne électrohydraulique 1KEG est alimentée, ce qui fournit de l'eau de refroidissement au compresseur. Après un certain temps, le relais RV est alimenté par le relais 4RP, qui active la vanne 2KEG. Cette vanne fermera la sortie d'air du compresseur vers l'atmosphère. Le délai du relais PB est légèrement plus long que le temps de démarrage du moteur, donc la vanne 2KEG est ouverte et le démarrage du moteur est facilité.
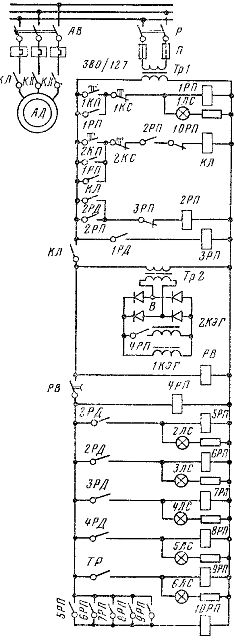
Riz. 2. Schéma de l'entraînement électrique d'un compresseur alternatif.
Si le débit d'air est faible et que la pression dans le récepteur dépasse la norme, le contact 1RD du circuit de relais 3RP se ferme. Ce dernier, avec son contact d'ouverture, coupe le relais 2RP.Le circuit de contact KL perd de l'alimentation, et le moteur est déconnecté du réseau.Lorsque le débit d'air augmente et que la pression dans le récepteur diminue par rapport à la norme, le pressostat fermera son contact supérieur 1RD et allumera le relais 2RP. La bobine du contacteur KL sera à nouveau alimentée et le compresseur démarrera de la même manière que celle décrite ci-dessus.
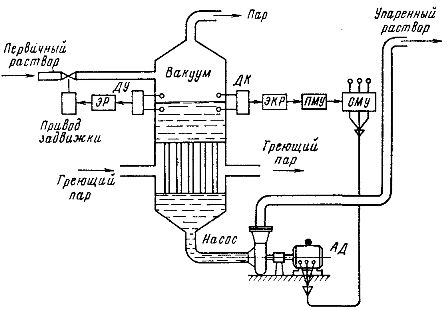
Riz. 3. Schéma de l'usine d'évaporation de liquide
Le circuit assure l'arrêt automatique du moteur si la pression d'air du réfrigérateur, la pression de l'eau et de l'huile de refroidissement fournies aux paliers principaux et la température de l'huile sont hors plage. Les paramètres spécifiés sont contrôlés à l'aide d'un pressostat 2RD, 3RD, 4RD et d'un relais de température TP. Les signaux d'arrêt du moteur sont transmis via le relais 5RP - 9RP au relais 10RP, ce qui provoque un arrêt d'urgence du contacteur KL.
En figue. La figure 3 montre un schéma d'une installation automatisée d'évaporation de liquide.Dans ce cas, la pompe est incluse dans le processus technologique principal de production de liquides. La solution alcaline est évaporée dans un échangeur de chaleur, où la concentration du liquide est augmentée au niveau requis. L'appareil fonctionne sous vide pour abaisser le point d'ébullition de la solution et donc pour réduire la chaleur fournie à l'appareil par le chauffage à la vapeur. La sélection des liquides de l'appareil et leur alimentation à l'étape suivante d'évaporation ou au réservoir de collecte s'effectuent en continu à l'aide d'une pompe. Le niveau requis de concentration de liquide est maintenu par un système de contrôle permanent.
Le système comprend des capteurs pour le contrôle du niveau et de la concentration de liquides DC dans l'appareil, des régulateurs électroniques ER et EK R., une vanne d'entraînement à l'entrée de l'appareil et un entraînement de pompe électrique à la sortie. La concentration des liquides est mesurée avec un capteur de température à pont car la température de la vapeur saturée au-dessus du liquide dépend de sa densité.
Le niveau de concentration requis est réglé avec un potentiomètre dans le régulateur électronique EKR. Lorsque la concentration augmente par rapport à un niveau donné, la tension de sortie de l'EKR et le courant de commande de l'amplificateur magnétique intermédiaire PMU augmentent. La vitesse du moteur de la pompe augmente et le débit de la pompe augmente. Ceci conduit à une réduction du temps d'évaporation du liquide traversant l'appareil. Par conséquent, la concentration commence à diminuer.
Avec une diminution du niveau de liquide dans l'appareil due à une augmentation du débit de la pompe, le capteur de niveau de la télécommande via le régulateur ER donne un signal pour ouvrir davantage la vanne d'admission.Un apport supplémentaire de solution rétablit le niveau dans l'appareil et contribue à la restauration la plus rapide du niveau de concentration prédéfini.
En figue. 4 montre un schéma d'un entraînement électrique automatisé d'une pompe d'une puissance allant jusqu'à 7 - 10 kW. La pompe est entraînée par un moteur à induction à cage d'écureuil. La vitesse du moteur est contrôlée à l'aide d'un amplificateur magnétique triphasé SMU, qui est inclus dans le circuit du stator. La grande hauteur statique de l'installation permet de fournir la plage nécessaire pour régler le débit de la pompe par une petite variation de la vitesse du moteur.
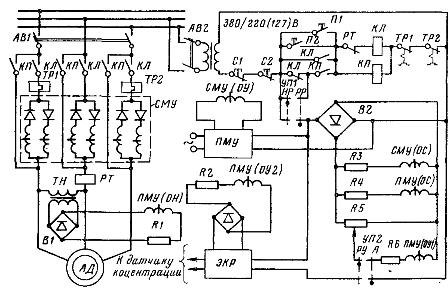
Riz. 4. Schéma de l'entraînement électrique de la pompe de l'évaporateur.
Afin d'obtenir des caractéristiques mécaniques suffisamment rigides de l'entraînement électrique, en plus du couplage de courant positif interne créé par les enroulements de travail du SMU, un couplage de tension négative est appliqué. L'utilisation du PMU permet d'augmenter la puissance de sortie de l'EKR au degré nécessaire pour contrôler le SMU, ainsi que de réduire la taille du transformateur de tension VT et d'augmenter la rigidité des caractéristiques mécaniques. Pour augmenter le couple moteur au démarrage, l'amplificateur de puissance magnétique est déplacé par le contacteur de la boîte de vitesses.
Le circuit de commande du moteur permet de démarrer et d'arrêter la pompe depuis le tableau de commande principal et depuis le lieu de son installation (boutons P1, P2, C1, C2).L'interrupteur UP1 permet de régler un mode de fonctionnement non régulé de la pompe HP lorsque le SMU reste entouré par le contacteur KP, et la pompe développe des performances maximales, ainsi que le mode réglable PP, lorsque KP à la fin du démarrage est désactivé par le relais de courant RT et que les enroulements de travail du SMU sont introduits dans le circuit statorique. A l'aide de l'interrupteur UP2, vous pouvez sélectionner l'un des modes de fonctionnement réglables de la pompe : automatique A ou commande manuelle de l'UR.