Nœuds des circuits d'automatisme en fonction du temps
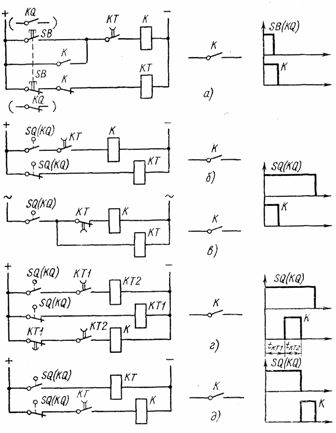
 Electromagnétique, électronique, moteur et électropneumatique sont largement utilisés dans les circuits d'automatisation. relais temporisé... Les schémas de conversion de durée de signal les plus courants sont illustrés à la fig. 1. Schéma fig. 1, et fournit une impulsion d'une certaine durée, quelle que soit la durée d'appui boutons SB. Après avoir appuyé sur le bouton SB, le relais K est activé, ce qui donne une impulsion pour allumer le mécanisme. La durée de l'impulsion est déterminée par la temporisation du relais KT. Le bouton SB peut être remplacé par un relais de commande KQ.
Electromagnétique, électronique, moteur et électropneumatique sont largement utilisés dans les circuits d'automatisation. relais temporisé... Les schémas de conversion de durée de signal les plus courants sont illustrés à la fig. 1. Schéma fig. 1, et fournit une impulsion d'une certaine durée, quelle que soit la durée d'appui boutons SB. Après avoir appuyé sur le bouton SB, le relais K est activé, ce qui donne une impulsion pour allumer le mécanisme. La durée de l'impulsion est déterminée par la temporisation du relais KT. Le bouton SB peut être remplacé par un relais de commande KQ.
Schémas Fig. 8, b (avec relais temporisé électromagnétique) et fig. 1, c (avec relais temporisé électropneumatique ou motorisé) servent à fournir une impulsion de courte durée après le début de l'action de l'interrupteur de course SQ. Dans ces schémas et les suivants, au lieu de contacts interrupteur de mouvement Des contacts de relais KQ peuvent être utilisés.
Riz. 1. Circuits de conversion de la durée des signaux
Schéma fig.1d fournit une impulsion de durée tKT2 avec une temporisation tKT1 après le début de l'action de l'interrupteur SQ.
Le nœud de circuit Fig. 1, e. Si une temporisation tKT1 est nécessaire avant l'application de cette impulsion, le circuit de la fig. 1, e. La durée d'impulsion est tKT2.
Dans les circuits de contrôle de position, le circuit de la Fig. 1g, qui assure la fonction d'émission d'une commande longue après la fin de l'impact sur le déclencheur SQ. La commande est annulée au début d'une nouvelle action sur le commutateur SQ.
Une courte temporisation (jusqu'à 1,5 s) peut être obtenue en allumant et éteignant de manière conventionnelle relais intermédiaires en raison du shunt de leurs bobines avec des condensateurs ou des diodes.
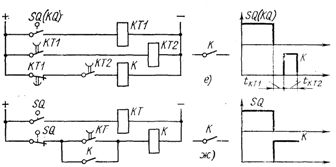
Dans le schéma de la fig. 2, et lorsque le contact KQ est fermé, le relais K est activé avec une temporisation déterminée par le temps de charge du condensateur C. Lorsque KQ est fermé, le relais K revient également avec un retard dû à la décharge du condensateur.

Riz. 2. Obtention de temporisations en shuntant les bobines des relais intermédiaires avec des condensateurs ou des diodes
Pour obtenir une temporisation uniquement lorsque le relais est allumé, utiliser le circuit de la Fig. 2, b. Le retard lorsque le relais est désactivé est pratiquement absent, car le condensateur se décharge rapidement vers la résistance R (la résistance de la résistance R est nettement inférieure à la résistance de la bobine de relais K). Un problème similaire est résolu par le circuit de la fig. 2c, qui utilise un contact d'ouverture du relais KQ. L'inconvénient de ce circuit est la perte importante d'énergie à travers la résistance en l'absence de signal.
Le schéma de la fig. 2d, où lorsque le contact KQ s'ouvre, le relais K s'éteint avec une temporisation commandée par la résistance R.
Selon le schéma de la fig. 2, e une temporisation est créée lorsque K est éteint après la fermeture du contact du relais de commande KQ.
Si un léger retard dans le retour du relais K est nécessaire lors de l'activation du relais de commande KQ, le schéma de la fig. 2, e, dans laquelle la bobine du relais K est shuntée par une diode.
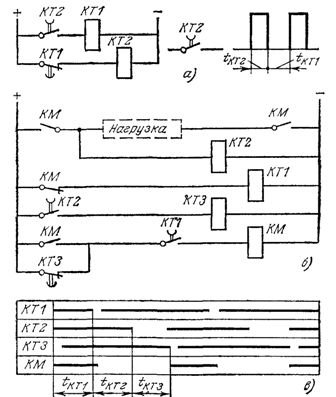
Le schéma de génération d'impulsions d'une durée et d'un rapport cyclique donnés est illustré à la fig. 3, un. La durée de l'impulsion est déterminée par la temporisation du relais KT2, la pause est déterminée par la temporisation du relais KT1.
Riz. 3. Circuits de relais pour générer des impulsions
En figue. 3, b, un schéma de la mise sous tension périodique du mécanisme avec un temps de pause prolongé est donné.Le temps de mise sous tension du contacteur KM est égal à la temporisation du relais KT1, la durée de la pause est la somme des retards des relais KT2 et KTZ. Le chronogramme est représenté sur la Fig. 3, ch.
Schémas des générateurs d'impulsions des relais temporisés ou éléments logiques (voir ci-dessous) sont également utilisés pour réguler la vitesse de fonctionnement des mécanismes linéaires. Le contrôleur de température s'est également répandu, contenant un dispositif de commande KEP-12U, à bien des égards similaire à un relais de synchronisation de moteur. L'unité a un moteur exécutif, des engrenages variables, un tambour à came, un interrupteur et 12 contacts.
Les régulateurs de vitesse utilisent généralement le schéma de fonctionnement cyclique du dispositif KEP-12U (Fig. 4, a). Le circuit est réalisé à l'aide des relais K1 et K2 et des contacts du dispositif de commande KT.1 et KT.2, dont le schéma de circuit est illustré à la fig. 4, b.
Avant de commencer le travail, allumez l'interrupteur S.Lorsque le contact du relais KQ est brièvement fermé, donnant une commande pour démarrer le cycle de service, le relais K1 est excité et auto-verrouillé. Le relais K2 est activé par la mise sous tension du dispositif de commande KT. Les enroulements du moteur LM1 et LM2 sont alimentés et le tambour à came commence à tourner. Les contacts de sortie du dispositif KT.3, KT.4, etc., se fermant séquentiellement, aux instants définis (voir le schéma de la Fig. 4, b) donnent des commandes pour activer les mécanismes linéaires. Au milieu du cycle, le contact KT.1 s'ouvre et le relais K1 s'éteint.
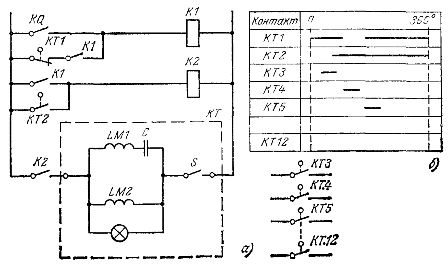
Figure 4. Contrôleur de vitesse de ligne avec le dispositif KEP-12U
La bobine de relais K2 prend en charge l'alimentation via le contact du dispositif KT.2. Après avoir fait tourner le tambour d'un angle de 360 °, le contact KT.2 s'ouvre, le moteur de l'appareil KEP-12U s'arrête. La chaîne est prête pour le prochain cycle.
En conclusion, nous considérerons deux schémas de contrôle à distance du retard des relais temporisés électromagnétiques.
Pour modifier le retard à partir du panneau de commande, vous pouvez utiliser un circuit de relais à deux bobines avec des bobines de déclenchement KT.1 et des bobines de retour KT. 2 (démagnétisation), dont les MDS sont dirigées de manière opposée (Fig. 5, a). La MDS de la bobine de déclenchement est ajustée à l'aide du potentiomètre RP. Pour éviter un fonctionnement répété du TC après le retour et le déclenchement de l'inversion de magnétisation, la MDS de la bobine de déclenchement doit être inférieure à la MDS suffisante pour tirer l'induit, ou son propre contact de fermeture de relais doit être introduit dans la bobine du circuit (Fig. 5, a).
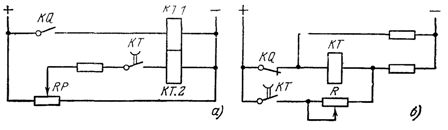
Figure 5. Schémas de réglage à distance de la temporisation du relais temporisé
Selon le schéma de la fig.5, b modifier à distance la temporisation d'un relais monobobine. Lorsque le contact KQ s'ouvre, la bobine de relais KT circule avec un courant de démagnétisation qui est régulé par la résistance R. Lorsque le courant de démagnétisation augmente, le retard du relais diminue et vice versa. Avec une tension d'alimentation de 220 V, un relais avec une bobine pour une tension nominale de 110 V est utilisé.