Circuits électriques des entraînements électriques des ponts roulants actionnés depuis le sol
Schémas de robinetterie et dispositifs de protection
 Dans l'industrie, lors d'opérations de transport et de stockage de faible intensité, dans les salles des machines et les salles de laboratoire, un grand nombre de ponts roulants sont utilisés, fonctionnant soit de manière sporadique, soit avec un nombre de cycles de levage de 6 à 10 par heure. Il est économiquement peu pratique d'utiliser des opérateurs à plein temps pour de telles grues. C'est pourquoi de plus en plus de ponts roulants sont manœuvrés depuis le sol.
Dans l'industrie, lors d'opérations de transport et de stockage de faible intensité, dans les salles des machines et les salles de laboratoire, un grand nombre de ponts roulants sont utilisés, fonctionnant soit de manière sporadique, soit avec un nombre de cycles de levage de 6 à 10 par heure. Il est économiquement peu pratique d'utiliser des opérateurs à plein temps pour de telles grues. C'est pourquoi de plus en plus de ponts roulants sont manœuvrés depuis le sol.
Une caractéristique des ponts roulants contrôlés depuis le sol est la possibilité d'accéder à la grue pour la réparation et le contrôle uniquement dans des endroits spécialement désignés équipés de zones appropriées pour vérifier les mécanismes et les équipements électriques. Par conséquent, l'ensemble du système de protection de l'équipement électrique de la grue doit être construit de manière à ce que la grue dans des conditions d'urgence puisse être amenée dans la zone de réparation sous contrôle depuis le sol et en l'absence de grue dans le circuit. courts-circuits et défauts à la terre.
A cet égard, sur les grues au sol, disjoncteurs ne sont pas installés.Les circuits principaux sont protégés par un interrupteur d'alimentation automatique chariots de baseet protection des circuits de commande — fusibles pour courants 15 A, 380 V avec une section des conducteurs des circuits de commande 2,5 mm2. La protection contre les surcharges des entraînements électriques des mécanismes est réalisée relais thermiques dans les circuits principaux des moteurs.
Pour permettre au robinet de se déplacer après le déclenchement de la protection thermique, les contacts du relais sont connectés à un bouton sur le panneau de commande. La vanne est équipée de lampes de signalisation pour la présence de tension à l'entrée, de tension après le contacteur pour la protection de ligne et d'une lampe de signalisation pour le fonctionnement de la protection thermique.
Schémas électriques des mécanismes de déplacement des ponts roulants
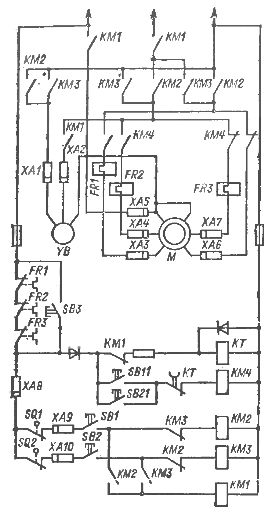
En figue. La figure 1 montre un schéma d'un entraînement électrique en mouvement sous contrôle de court-circuit d'un moteur monovitesse.
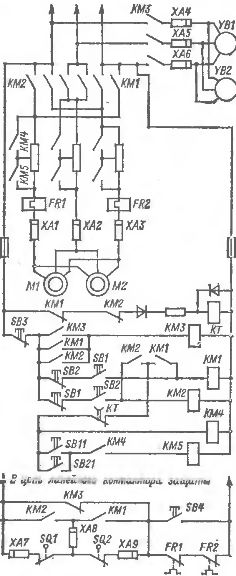
Riz. 1. Schéma d'entraînement électrique (avec un moteur à cage d'écureuil à une vitesse) du mécanisme de déplacement de la grue lorsqu'il est actionné depuis le sol: M1, M2 - moteurs électriques, YB1, YB2 - électroaimants de freins ou poussoirs électrohydrauliques, KM1, KM2 - contacteurs directionnels, KM4, KM5 — contacteurs de résistance dans les stators du circuit, KMZ — contacteur de frein, KT — relais temporisé de démarrage, FR1, FR2 — relais thermiques, SQ1, SQ2 — interrupteurs de fin de course, SB1, SB2 — boutons de direction de mouvement (deux - voie), SB11, SB21 — boutons de démarrage, SB3 — bouton d'arrêt du mouvement libre, SB4 — bouton de dérivation de la protection thermique, XA1 — XA9 — contacts des chariots de transfert de courant
Ce circuit est conçu pour entraîner des grues à bogies d'une capacité de charge de 3 à 20 tonnes et des entraînements de grue pour des grues d'une capacité de charge de 2 à 5 tonnes.Les enroulements du stator d'un moteur à cage d'écureuil sont alimentés par le réseau à travers deux étages de résistances. Les caractéristiques mécaniques de l'entraînement sont représentées sur la Fig. 2, un.
Contrôle de l'entraînement électrique - à partir de boutons suspendus. La commande comprend deux boutons principaux bidirectionnels SB1 et SB2, qui donnent une commande de déplacement dans deux directions. Le passage à une position sans réglage des résistances est effectué lorsque des commandes sont émises à l'aide des boutons SB11, SB21.
Lorsque le moteur est allumé, l'alimentation de l'entraînement de frein YB est fournie via les contacts des contacteurs KM1, KM2 via les contacts de KMZ. Après l'arrêt du moteur électrique, l'entraînement du frein continue d'être alimenté et le mécanisme a une course libre.Pour desserrer le frein, utilisez le bouton SB3, commun au bogie et au mécanisme d'essieux. Lorsqu'il est déclenché interrupteurs de fin de course SQ1 et SQ2, le contacteur de ligne de protection est déclenché et superposé frein mécanique.
Fournir de l'électricité freinage opposé après l'utilisation du démarrage gratuit relais temporisé CT avec une temporisation de 2-3 s, qui ralentit le variateur dans une position avec un couple de démarrage (freinage) minimum.
En figue. 3 montre un schéma d'un entraînement électrique pour le mouvement d'un pont roulant (chariot) à l'aide moteurs à cage d'écureuil à deux vitesses… Le moteur a deux enroulements séparés avec un rapport de pôle



Le bouton SB1 ou SB2 regroupe les contacteurs directionnels KM1, KM2 ainsi que le contacteur petite vitesse KM4. Après avoir alimenté l'enroulement à basse vitesse du moteur via le contacteur KMZ, l'actionneur de frein YB1, YB2 est alimenté.Pour passer en grande vitesse, les boutons va-et-vient SB ferment les contacts SB11, SB21 (deuxième position) et enclenchent le contacteur KM6.
La bobine à grande vitesse est connectée au réseau par l'intermédiaire d'une résistance en même temps que la bobine à basse vitesse. La bobine basse vitesse est alors désactivée. Après la temporisation du relais KT (2-5 s), le contacteur KM5 s'allume et le moteur atteint sa caractéristique naturelle du mode haute vitesse (Fig. 2, b).
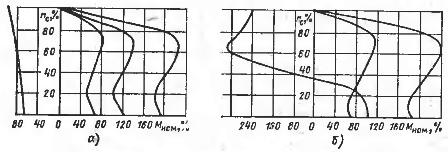
Riz. 2. Caractéristiques mécaniques des schémas fig. 13
Lorsque le moteur est déconnecté du réseau, l'actionneur de frein continue à être alimenté et la roue libre se produit. Le freinage électrique peut être appliqué lors du passage de la grande vitesse à la petite vitesse. Pour desserrer le frein, appuyez simplement sur le bouton SB3.
Lorsque la dernière défense est déclenchée par l'ouverture contacteur de ligne sur tableau de protection le moteur électrique est éteint et le frein mécanique est engagé. Le mécanisme est inhibé avec une intensité maximale.
En raison de l'utilisation de résistances dans le circuit pour les enroulements à grande vitesse, un démarrage relativement doux est effectué sous le contrôle du relais temporisé KT, mais le couple de freinage de l'enroulement à basse vitesse n'est pas limité, et dans ce cas, doux le freinage peut être obtenu par plusieurs interrupteurs à impulsion du bouton SB1 ou SB2.
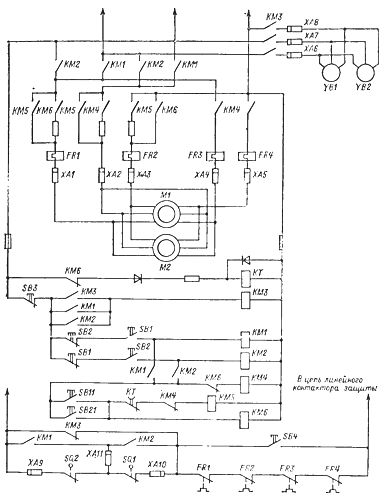
Riz. 3. Schéma de l'entraînement électrique (avec moteur à cage d'écureuil à deux vitesses) du mécanisme de déplacement de la grue lorsqu'il est actionné depuis le sol : M1.M2 - moteurs électriques, YB1, YB2 - entraînements de frein, KM1, KM 12 - contacteurs pour le sens de marche, KMZ - contacteur de frein, KM4 - contacteur à basse vitesse, KM5 - contacteur à grande vitesse, KM6 - contacteur de résistance dans le circuit du stator, FRI, FR2 , FR3 — relais thermiques, KT — relais temporisé de commande de marche, SQ1, SQ2 — interrupteurs de fin de course, SB1, SB2 — boutons de sens de marche (bidirectionnels) : SB11, SB21 — boutons de vitesse élevée (deuxième position du bouton SB1, SB2), СВЗ — libération du bouton d'arrêt libre, SB4 — bouton de dérivation de la protection thermique, ХА1- ~ ХЛ11 — contacts des chariots de transmission de courant.
En figue. La figure 4 montre un schéma du mécanisme de déplacement d'un pont roulant utilisant un moteur à deux vitesses sans vidange libre. Le circuit diffère de celui considéré par l'inclusion séquentielle des enroulements à basse et à grande vitesse et une certaine limitation du couple de freinage lorsque les enroulements sont connectés en série. Le schéma est recommandé pour les ponts roulants fonctionnant à l'extérieur.
Schémas de connexion des mécanismes de levage des grues
En figue. La figure 5 montre un circuit de commande d'un entraînement de palan électrique utilisant un moteur à cage d'écureuil à deux vitesses avec deux enroulements indépendants avec un rapport de nombre de pôles de 4/24 et 6/16. Le circuit est construit sur le principe de la double coupure à partir de deux dispositifs indépendants du circuit principal des enroulements du moteur électrique et des circuits de l'entraînement du frein, ce qui assure la fiabilité nécessaire de l'entraînement du palan.
L'enroulement à basse vitesse du moteur électrique est alimenté par les contacts du contacteur de ligne KM1, les contacts des contacteurs de direction KM2, KMZ et les contacts d'interruption du contacteur KM4 après avoir appuyé sur le bouton correspondant SB1, SB2 (première position).
Riz. 4. Schéma de l'entraînement électrique (avec un moteur à cage d'écureuil à deux vitesses) du mécanisme de déplacement de la grue: M - moteur électrique, YB - entraînement du frein, KM1, KM2 - contacteurs pour le sens du mouvement, KMZ - basse vitesse contacteur, KM4 — contacteur à grande vitesse, KM5 — Contacteur de résistance à grande vitesse, CT — Relais de contrôle du temps de démarrage, FR4 — Relais thermiques, SQ1, SQ2 — Interrupteurs de fin de course, SB1, SB2 — Boutons de sens de déplacement, SB11, SB21 — Haut Boutons de vitesse, SB3 - bouton de relais thermique de dérivation, XA1 -XA10 - contacts de transfert de courant
Lorsque le bouton SB11 (SB21) est enfoncé, la bobine du contacteur KM4 est alimentée, elle passe de la petite vitesse à la grande vitesse avec une coupure de courant minimale. Dans ce cas, il ne peut y avoir de position lorsque les bobines grande vitesse et petite vitesse sont désactivées. Le passage d'un bobinage à basse vitesse à un bobinage à grande vitesse s'effectue sous le contrôle du relais temporisé KT. Lorsque la protection de limite est activée, les enroulements du moteur et le frein sont activés deux fois.
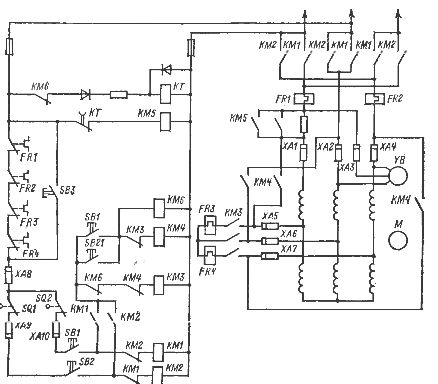
En figue. 6 montre un schéma de l'entraînement électrique du mécanisme de levage avec deux moteurs électriques en court-circuit reliés l'un à l'autre et à la boîte de vitesses par l'intermédiaire d'un engrenage planétaire avec un rapport de transmission de 6-8. Le moteur électrique à basse vitesse M2 est allumé pendant toute la durée de fonctionnement du mécanisme. Le moteur à grande vitesse est engagé pendant le fonctionnement à grande vitesse.Le moteur électrique à basse vitesse a un frein intégré.
Riz. 5. Schéma de l'entraînement électrique (avec un moteur à cage d'écureuil à deux vitesses) du mécanisme de levage lorsqu'il est actionné depuis le sol: M - moteur électrique, YB - bobine de frein, KM1 - contacteur lily, KM2 - KMZ - contacteurs directionnels, KM4 - contacteur pour la vitesse de commutation, FR1 - FR3 - relais thermique, CT - relais de contrôle d'accélération, SQ1, SQ2 - interrupteurs de fin de course, SB1, SB2 - boutons de direction (bidirectionnels). SB3 - bouton pour shunter les relais thermiques, SB11, SB21 - boutons rapides (deuxième position des boutons SB1, SB2), XA1 - XA10 - contacts des chariots de transfert de courant.
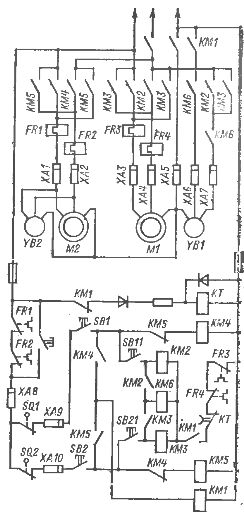
Riz. 6. Schéma du micromoteur du mécanisme de levage lorsqu'il est actionné depuis le sol: M1 - moteur électrique à grande vitesse, M2 - moteur électrique à basse vitesse, YB1 - bobine de frein à grande vitesse, YB2 - bobine de frein moteur à basse vitesse, KM1 - contacteur linéaire, KM2 - KMZ - tours des contacteurs directionnels élevés, KM4, KM5 - contacteurs à basse vitesse, KM6 - contacteur de frein à grande vitesse, KT - relais de contrôle du temps de démarrage, SQ1, SQ2 - interrupteurs de fin de course, FR1 - FR4 - relais thermiques, SB1, SB2 - boutons de direction bidirectionnels, SB11, SB21 - boutons rapides (deuxième position des boutons SB1, SB2), XA1— XA10 - contacts des chariots de transfert actuels
Le moteur électrique à grande vitesse a un frein séparé actionné par propulseur électro-hydraulique… Lorsque le bouton de direction SB1 (SB2) est enfoncé, la bobine du contacteur KM4 (KM5) est excitée et le moteur à basse vitesse est allumé. En même temps, le contacteur de ligne commune KM1 est activé.
Lorsque le bouton SB1 (SB2) est enfoncé à fond, les contacts SB11 (SB21) sont fermés, la bobine du contacteur KM2 (KMZ) et KM6 est excitée, mais après l'expiration du temps de démarrage à basse vitesse sous le contrôle du relais KT , le moteur à grande vitesse est allumé.
Lors de la décélération de la montée ou de la descente après l'arrêt du moteur à grande vitesse, le freinage à basse vitesse est effectué par le frein YB1. Après l'actionnement des interrupteurs de fin de course SQ1 et SQ2, l'entraînement électrique est arrêté avec un double circuit ouvert des entraînements moteur et frein.
Tous les schémas décrits, conformément à la disposition relative à l'activation des mécanismes de la grue lors du travail à partir du sol, uniquement en appuyant constamment sur le bouton.Lorsque tout type de protection est désactivé, le mécanisme s'arrête, quel que soit l'état de la commande du bouton appareil.
Les schémas considérés sur la fig. 2-5 peuvent être assemblés à partir de démarreurs magnétiques standards type PMA, PML et relais temporisé. Une exception est le schéma de la fig. 2 dans lequel un contacteur est utilisé pour commuter les révolutions contacteur cc MK1-22, 40 A, 380 V, bobine 220 V. Selon les schémas indiqués, des tableaux de commande pour moteurs d'une puissance de 0,8 à 2×8,5 kW et des tableaux de commande pour moteurs de levage d'une puissance de 10 à 22 kW ont été développé.