Schéma de commande automatique pour deux groupes motopompes
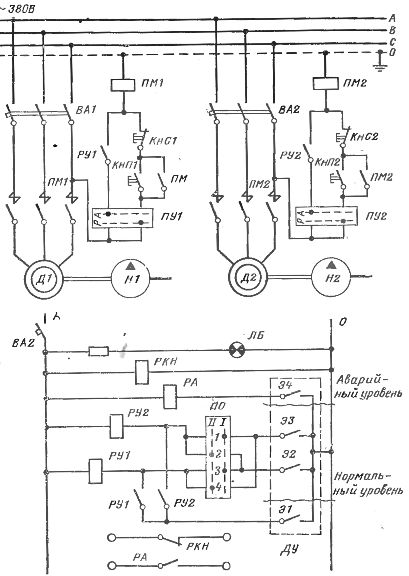
 La figure montre un schéma de la commande automatique de deux groupes de pompage fonctionnant sans personnel de service.
La figure montre un schéma de la commande automatique de deux groupes de pompage fonctionnant sans personnel de service.
Le fonctionnement du circuit est basé sur le principe du démarrage et de l'arrêt des pompes, en fonction du niveau de liquide dans la cuve contrôlée à partir de laquelle s'effectue le pompage. Permet de contrôler le remplissage du réservoir en liquide capteur de niveau d'électrode DU. Sur les deux groupes motopompes, l'un est en marche et l'autre en mode veille.
Le mode de fonctionnement des blocs est réglé interrupteur de commande (Interrupteur de pompage SW) : en position 1 de l'interrupteur, la pompe H1 avec le moteur D1 fonctionnera et la pompe H2 avec le moteur D2 sera en mode veille, qui est activé si la capacité de la pompe H1 est insuffisante. En position 1, la pompe de travail est H2 et la pompe de secours est H2.
Considérez le fonctionnement du circuit lorsque le commutateur logiciel est en position 1 et que les commutateurs PU1 et PU2 sont en position A, c'est-à-dire contrôle automatique de la pompe.Les contacts 1 et 3 de l'interrupteur PO ferment les circuits des bobines de relais RU1 et RU2, mais le relais ne s'allume pas, car à un niveau de liquide normal, les électrodes E2 et EZ du capteur de niveau de la télécommande restent ouvertes.
Circuit automatique pour le contrôle de deux pompes d'évacuation
Lorsque le niveau de liquide dans le récipient monte jusqu'à l'électrode E2, le circuit de la bobine se ferme relais intermédiaire RU1, il est déclenché et à travers le contact de fermeture RU1 est alimenté à la bobine de démarrage PM1. Le moteur D1 s'allume et la pompe H1 commence à pomper.
Le niveau de liquide dans le réservoir diminue, mais à la rupture du contact E2, le moteur D1 ne s'arrête pas, car la bobine de relais RU1 continue de recevoir de l'énergie par son contact RU1 et le contact fermé de l'électrode E1. Un tel blocage du relais RU1 est utilisé pour éviter les démarrages et les arrêts fréquents de l'unité de pompage avec de petits changements dans le niveau de liquide et garantit que la pompe ne s'arrête que lorsque le niveau de liquide tombe en dessous de la normale et que le contact E1 s'ouvre.
Si un arrêt d'urgence de la pompe en marche se produit ou si ses performances sont insuffisantes, le niveau de liquide dans le réservoir continuera à monter. Lorsqu'il atteint l'électrode EZ du capteur de télécommande, la bobine de relais RU2 sera excitée. Le relais fonctionnera et allumera le démarreur magnétique PM2, le moteur de la pompe de secours D2 s'allumera. L'appareil en mode veille s'éteindra lorsque le niveau de liquide descendra en dessous de l'électrode A1.
Si, pour une raison quelconque, il y a un afflux important de liquide dans le réservoir, le travail des deux groupes motopompes peut être insuffisant et le liquide montera jusqu'au niveau maximal autorisé auquel l'électrode E4 est installée. Cela fermera le circuit de la bobine du relais PA, qui fonctionnera et avec son contact de fermeture activera le circuit d'alarme, informant le personnel du fonctionnement anormal des unités de pompage.
Le relais de contrôle de tension RKN est utilisé pour fournir un signal d'avertissement en cas de panne de tension dans les circuits de contrôle. Les circuits d'alarme sont alimentés par une alimentation indépendante. Le voyant blanc LU sert à avertir de la présence de tension dans les circuits de commande lors des vérifications de contrôle de l'équipement.
Le passage au contrôle manuel (local) des unités de pompage s'effectue en tournant les interrupteurs PU1 et PU2 en position P. Les moteurs D1 ou D2 sont allumés et éteints en appuyant sur les boutons KnP1 et KnS1 ou KnP2 et KnS2 situés directement sur le unités de pompage.
Voir également: Sélection de la puissance du moteur électrique de l'unité de pompage