Circuits de commande et de puissance pour électroaimants de levage
 Les électroaimants de levage ont une inductance élevée, par conséquent, pour une décharge rapide et complète de la charge, ainsi que pour limiter la surtension à une valeur ne dépassant pas 2 kV, des circuits et des équipements de contrôle spéciaux sont utilisés. Les électroaimants reçoivent la tension d'un moteur-générateur ou d'un redresseur. Les schémas de contrôle schématiques lorsque les électroaimants sont alimentés par un réseau à courant continu sont illustrés à la fig. 1, a et b.
Les électroaimants de levage ont une inductance élevée, par conséquent, pour une décharge rapide et complète de la charge, ainsi que pour limiter la surtension à une valeur ne dépassant pas 2 kV, des circuits et des équipements de contrôle spéciaux sont utilisés. Les électroaimants reçoivent la tension d'un moteur-générateur ou d'un redresseur. Les schémas de contrôle schématiques lorsque les électroaimants sont alimentés par un réseau à courant continu sont illustrés à la fig. 1, a et b.
Contrôle électroaimant de levage selon le schéma indiqué s'effectue de la manière suivante. Lorsque le contrôleur K est mis sous tension, une tension est appliquée au contacteur magnétisant B, dont les contacts de fermeture relient l'électroaimant au réseau. Dans ce cas, le courant nominal traverse la bobine M de l'électroaimant et la résistance de décharge connectée en parallèle (P1 - P4, P4 - PZ et PZ - P2) circule avec un courant de valeur inférieure. La bobine du contacteur H connectée entre les points 6 et 7 ne conduit pas du fait de la présence d'un contact auxiliaire ouvert B en série, ouvert lorsque le contacteur B est fermé.
Lorsque le contrôleur K.est éteint, les contacts de fermeture du contacteur B s'ouvrent, l'électroaimant est brièvement désexcité et passe automatiquement en inversion de polarité, et après la chute de la charge, l'électroaimant est finalement déconnecté de la source d'alimentation. Cette inclusion de l'électroaimant assure la démagnétisation de la charge, ce qui contribue à sa chute rapide.
L'action automatique lorsque l'électroaimant est éteint est principalement assurée par le fonctionnement du contacteur démagnétisant H. La tension aux bornes de la bobine du contacteur H est déterminée par la chute de tension dans les sections de résistance 6-P4 et P4-7 . Lorsque l'électroaimant est éteint, son courant ne disparaît pas immédiatement, mais est fermé par un circuit de résistances de décharge. Les résistances des sections 6-P4 et P4-7 sont sélectionnées de telle manière qu'après l'arrêt du contrôleur K et la fermeture du contact d'ouverture B, le contacteur H est activé.
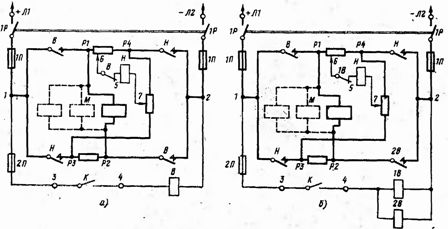
Riz. 1. Schémas de commande schématiques des contrôleurs magnétiques PMS 50 (a) et PMS 150 (b) pour électroaimants de levage: V ou 1V, contacteur magnétisant bipolaire 2V ou deux unipolaires; H — contacteur démagnétisant bipolaire ; 1P — interrupteur ; 1P, 2P - fusibles du circuit d'alimentation et du circuit de commande ; K — contrôleur de commande ; M — électroaimant ; Résistances de décharge P1-P4, P4-P3 et P3-P2.
Après la mise sous tension du contacteur H, ses contacts de puissance sont fermés et l'électroaimant est connecté au réseau. Dans ce cas, le sens du courant dans la bobine de l'électroaimant et dans la résistance 6-P4 connectée en série avec la bobine évolue dans le temps dans le sens inverse. Le changement de sens du courant dans la section de la résistance 6 - P4 se produit avec une réduction préliminaire du courant de direction opposée précédent à zéro.A courant nul dans la section 6-P4, le contacteur H reste fermé car la chute de tension dans la section P4-7 est suffisante pour cela (dans la section 6-P4, la chute de tension est nulle).
Lorsque le sens du courant change dans la section 6 - P4, le contacteur H est désactivé, car sa bobine s'avère être connectée à la différence de chute de tension dans les sections 6 - P4 et P4 - 7. L'interruption du contacteur H se produit lorsque le courant de démagnétisation atteint une valeur égale à 10-20% du courant de fonctionnement de la bobine froide de l'électroaimant, c'est-à-dire pratiquement après démagnétisation et perte de charge.
Une fois éteint, le contacteur H déconnecte la bobine du solénoïde du réseau, qui reste fermé à la résistance de décharge. Cela facilite l'interruption de l'arc du contacteur et réduit les surtensions, augmentant ainsi la durée de vie de l'isolation de la bobine. L'ouverture du contact auxiliaire du contacteur B (dans le circuit de la bobine du contacteur H) empêche le fonctionnement simultané des deux contacteurs.
Le circuit vous permet de régler le temps de démagnétisation, ce qui peut être fait en déplaçant les pinces de résistance, c'est-à-dire en modifiant les valeurs de résistance des sections 6 — P4 et P4—7. En même temps, ce temps est automatiquement ajusté en fonction du type de charge soulevée. Avec une masse de charge plus importante, sa conductivité magnétique est plus importante, ce qui conduit à une augmentation de la constante de temps de l'électroaimant et donc à une augmentation du temps de démagnétisation. Avec un poids léger de la charge, le temps de démagnétisation est réduit.
Selon le schéma décrit, des contrôleurs magnétiques de types PMS 50, PMS 150, PMS50T et PMS 150T sont produits.
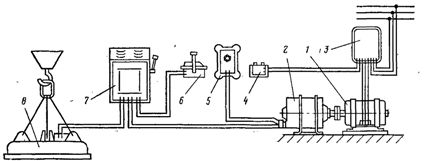
Riz. 2.Circuit électrique de l'électroaimant de levage de la grue en présence d'un réseau à courant alternatif : 1 — moteur électrique asynchrone ; 2 — générateur de courant adéquat ; 3 - démarreur magnétique ; 4 — bouton de commande ; 5 - régulateur d'excitation ; 6 - contrôleur de commande ; 7 - contrôleur magnétique ; 8 — électroaimant de levage.
La plupart des grues équipées de solénoïdes de levage sont alimentées par le secteur AC, de sorte qu'un moteur-générateur ou un redresseur doit être utilisé pour les solénoïdes DC. En figue. La figure 2 montre le circuit d'alimentation de l'électroaimant de levage à partir du moteur-générateur. Protection du générateur contre les courants de court-circuit. un relais de tension de type REV 84 est conduit dans le câble alimentant l'électroaimant.
Le remplacement des convertisseurs rotatifs par des convertisseurs statiques réduit les coûts d'investissement, le poids électrique et les coûts d'exploitation. Le contrôleur magnétique de type PSM 80 en combinaison avec le contrôleur de contrôle selsyn KP 1818 permet le réglage de la capacité de charge. Ceci est d'une grande importance dans les travaux liés à la finition, au tri, au marquage et au transport de la tôle dans les usines métallurgiques, ainsi que dans divers entrepôts et bases.
En figue. La figure 3 montre un schéma d'un contrôleur magnétique PSM 80 avec un convertisseur à commande statique. Le convertisseur est réalisé selon un circuit pleine onde triphasé sans transformateur avec un thyristor et une diode de décharge. La régulation du courant s'effectue en modifiant la tension de sortie du convertisseur en modifiant l'angle d'ouverture du thyristor. L'angle d'ouverture du thyristor dépend du signal de référence, qui est réglable en continu sur une large plage par le contrôleur de contrôle synchrone.
L'alimentation I utilise un transformateur à trois enroulements.L'enroulement 36 V est utilisé pour alimenter les éléments de relais, la tension d'excitation selsin du contrôleur est retirée de l'enroulement 115 V. L'alimentation comprend un redresseur monophasé D7-D10, à la sortie duquel des diodes zener St1-St3 et une résistance de ballast R2 sont installés.
La tension d'alimentation stabilisée de l'élément de relais 16,4 V est supprimée par les diodes Zener St2 et St3. Dans ce cas, un courant direct traverse la résistance R3 et la base du transistor T1, ce qui rend le transistor passant. A partir de la diode zener St1, une polarisation négative (-5,6 V) est appliquée à la base du transistor T2 pour le bloquer lorsque le transistor T1 est ouvert.
La tâche bloc II consiste en Selsinainclus dans le contrôleur selsyny et le redresseur monophasé D11-D14. La tension de ligne du rotor selsyn est appliquée à l'entrée du pont, qui change lorsqu'il tourne par rapport au stator. Le rotor est entraîné en rotation par la poignée CCK.A la sortie du pont, une tension redressée changeante est obtenue, en proportion de laquelle le courant de sortie qui circule lorsque le transistor T1 est ouvert, à travers sa base et sa résistance R6, change également. L'élément relais est monté sur deux transistors de type p-p-p.
Pour fournir un mode de contrôle de phase dans le circuit, une source de tension en dents de scie est fournie, qui est un circuit RC, qui est shunté par le thyristor T. Lorsque le thyristor est fermé, les condensateurs C4 C5 sont chargés. Lorsque le thyristor T s'ouvre, une décharge rapide des condensateurs se produit. Le courant de scie traverse la résistance R13 et la base du transistor T1.
Le contrôleur selsinki a une position fixe (zéro) et fournit une condition de freinage à n'importe quelle position intermédiaire de la poignée de commande.Dans ce cas, une certaine valeur du courant électromagnétique correspond à chaque position du rotor selsyn. Dans les positions de commande, le circuit maintient avec une précision suffisante la valeur moyenne du courant de l'électroaimant lorsque sa bobine est chauffée. Les tolérances de courant pour les bobines froides et chaudes ne dépassent pas 10 % et la valeur maximale du courant pour la bobine chauffée ne dépasse pas la valeur catalogue du courant de plus de 5. Lorsque la tension d'alimentation fluctue dans la plage (0,85 - 1,05) UH, la variation de courant de l'électroaimant ne dépasse pas les limites spécifiées.
Le circuit de commutation côté CC comprend :
• contacteurs bipolaires pour la commutation directe des électroaimants KB et inverse CV;
• deux relais temporisés РВ et РП pour contrôler le processus de démagnétisation de l'électroaimant pendant l'arrêt,
• décharger les résistances R19 — R22 pour limiter la surtension qui se produit lorsque l'électroaimant est éteint ;
• diode D4 pour réduire la puissance des résistances de décharge.
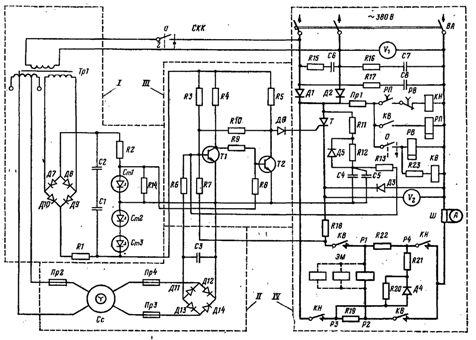
Riz. 3. Schéma de réglage de la capacité de charge de l'électroaimant: I - bloc d'alimentation: II - bloc de tâches; III — élément de relais ; VI — circuit de puissance ; R1 — R25 — résistances ; C1 — C8 — condensateurs, W — shunt ; VA — interrupteur automatique ; D1 -D16 — diodes ; KV et KN - contacteurs à enroulement direct et inverse d'un électroaimant (magnétisation et démagnétisation); РВ et РП - relais temporisé pour contrôler le processus de démagnétisation, Pr1 - Pr4 - fusibles; Сс — contrôleur selsyn ; St1 -St3 — diodes Zener ; T — thyristor : T1, T2 — transistors, TP1 — transformateur ; EM — électroaimant de levage ; SKK — contrôleur de contrôle selsyn.
Si le câble alimentant l'électroaimant se casse, il est nécessaire d'éteindre l'interrupteur ou le disjoncteur du contrôleur magnétique. Il est strictement interdit de se trouver sous un robinet avec un électroaimant en état de marche. L'inspection et le remplacement des appareils doivent être effectués avec l'interrupteur principal du robinet éteint.
Tous les appareils électriques doivent être solidement mis à la terre. Portez une attention particulière à la mise à la terre de l'électroaimant. Le boulon de mise à la terre dans le boîtier du solénoïde est connecté au boulon de mise à la terre de l'armoire du contrôleur magnétique. La connexion est établie à partir de l'un des conducteurs du câble d'alimentation à trois conducteurs. Dans le cas contraire, le fonctionnement des équipements électriques doit être guidé par les règles générales de sécurité pour l'entretien des installations électriques.