Commande moteur en fonction du courant
 La commande du moteur peut être effectuée en fonction de la force du courant du stator. Le circuit de démarrage en fonction du courant d'un moteur à induction à rotor bobiné est illustré à la Fig. 1 un.
La commande du moteur peut être effectuée en fonction de la force du courant du stator. Le circuit de démarrage en fonction du courant d'un moteur à induction à rotor bobiné est illustré à la Fig. 1 un.
Au moment du démarrage, le courant atteint la valeur I1, et après un certain intervalle de temps il diminue jusqu'à la valeur I2 (fig. b). A ce stade, une partie de la résistance de démarrage dans le circuit du rotor est automatiquement court-circuitée, le courant monte à la valeur I1, puis redescend à la valeur I2, ce qui provoque le court-circuit d'une autre partie de la résistance de démarrage. Ce processus est répété jusqu'à ce que tous les étages de la résistance de démarrage soient court-circuités. À ces fins, un relais de surintensité est utilisé, dont les enroulements sont inclus dans le circuit de puissance du moteur.
Lorsque vous cliquez sur Bouton Start SB1 (voir fig. A) le contacteur KM est activé, dont les contacts principaux connectent le moteur au réseau à la résistance de démarrage commune dans le circuit du rotor. Dans ce cas, la bobine du relais KA reçoit une alimentation dont les contacts d'ouverture se trouvent dans le circuit de la bobine accélératrice K1.Le relais KA est réglé pour que le temps de réponse soit plus court que celui du contacteur K1. De plus, ses contacts de coupure à la valeur maximale admissible courant de démarrage s'ouvrent et lorsque le courant diminue jusqu'à sa valeur de commutation, ils se referment, grâce à quoi la bobine K1 est activée via les contacts du relais KA au moment du court-circuit de l'étage de résistance de démarrage.
Le relais KA fonctionnera avant que le contacteur d'accélération K1 ne soit alimenté et le moteur accélérera lorsque la résistance de démarrage sera complètement introduite. Lorsque le courant de commutation de démarrage diminue, les contacts du relais KA se ferment et la bobine K1 s'allume. Dans le même temps, le contact K1 se ferme, assurant l'auto-alimentation de la bobine indépendamment du relais KA, et le contact dans le circuit de commande s'ouvre, empêchant l'inclusion prématurée de l'accélérateur K2.
Comme les contacts d'alimentation K1 font partie du court-circuit de la résistance de démarrage, le courant du stator augmente jusqu'à la valeur maximale et le relais KA, lorsqu'il est déclenché, ouvre ses contacts dans le circuit d'alimentation de la bobine K2. Lorsque le moteur atteint une vitesse suffisante et que le courant du stator retombe au courant de commutation, les contacts du relais KA se ferment et activent la bobine K2, qui court-circuite le deuxième étage de résistance de démarrage à ses contacts.
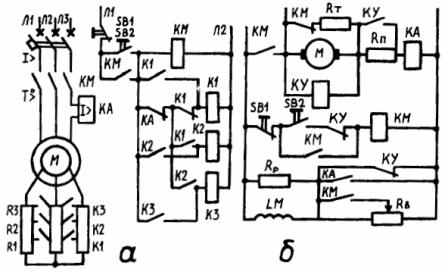
Riz. 1. Circuits de commande en fonction du courant : a — moteur asynchrone à rotor de phase ; b — Moteur à courant continu à excitation parallèle
Dans ce cas, le courant du stator augmente à nouveau, le relais KA va fonctionner et ouvrir ses contacts. La bobine K2 ne perdra pas de puissance car elle aura le temps de se fermer avec les contacts auxiliaires K2.Une nouvelle diminution du courant du stator après la prochaine accélération entraînera l'activation de l'enroulement K3 et court-circuitera le dernier étage de la résistance de démarrage. Une pression sur le bouton SB arrête le moteur et le circuit est prêt pour le prochain démarrage. En utilisant les relais de courant configurés pour revenir à un courant de 12, divers entraînements électriques peuvent être arrêtés et inversés. L'inconvénient des circuits de commande dans la fonction courant est le nombre assez important de contacts.
Pour la commande irréversible d'un moteur à courant continu à excitation parallèle de plusieurs kilowatts, un seul étage du rhéostat de démarrage peut être utilisé (voir Fig. C). Le schéma montre : la régulation de la résistance RB dans le circuit d'excitation ; résistance de décharge Rp connectée en parallèle avec la bobine d'excitation LM ; une résistance de freinage RT connectée en parallèle à l'induit M lors de la déconnexion du réseau et une résistance de démarrage RP connectée en série au circuit d'induit pendant la période de démarrage. Pour produire un flux maximal au démarrage, la bobine de champ LM en position initiale est allumée à pleine tension.
Lorsque le bouton SB2 est enfoncé, l'induit du moteur du contacteur de ligne KM est connecté en série au réseau avec la résistance RP Le relais de commande du démarreur SC fonctionne en fonction du courant d'induit. Lorsque le courant augmente, le contact de fermeture de KA manipule la résistance RB, augmentant le flux magnétique d'excitation, et lorsque le courant diminue, le contact de KA s'ouvre et la bobine LM est connectée en série avec la résistance du rhéostat RB, en raison de où le courant magnétique diminue.
Lorsque le moteur est démarré, l'augmentation du courant d'induit de démarrage active le relais KA et la bobine LM crée un flux maximal. Lorsqu'une certaine vitesse est atteinte, le contacteur d'accélération K est activé, la résistance de démarrage RP est court-circuitée, après quoi le moteur fonctionne selon ses caractéristiques naturelles. Lorsque le courant d'induit diminue (en raison de l'accélération du moteur) avant que le relais KA ne s'excite, le contact KA dans le circuit d'excitation s'ouvre.
L'enroulement LM s'allumera en série avec la résistance RB, ce qui affaiblira le flux de champ et augmentera le courant d'induit en conséquence. Le relais KA fonctionnera à nouveau, augmentant le flux et augmentant simultanément la vitesse du moteur. Lors du démarrage, le relais de l'engin spatial est déclenché plusieurs fois jusqu'à ce que le moteur atteigne la vitesse définie par le rhéostat de commande RB. Un tel dispositif vibrant fonctionnant en fonction du courant simplifie le circuit par rapport aux circuits de commande en fonction du temps.
Lorsque le moteur est allumé en appuyant sur le bouton SB1, l'armature est allumée du contact d'ouverture KM à la résistance de freinage RT et le freinage dynamique est effectué automatiquement. Au début de l'arrêt, le champ magnétique est légèrement affaibli en raison de l'ouverture du contact KM sur le curseur du rhéostat de régulation, et le courant d'excitation traverse toute la résistance RB. Au fur et à mesure que la vitesse du moteur diminue, le contacteur d'accélération K est désexcité et le flux augmente lorsque la bobine d'excitation est mise sous tension à pleine ligne via le contact d'ouverture K, ce qui entraîne une augmentation du couple de freinage.