Circuits de commande de moteur en fonction du temps
 Ce type de contrôle est utilisé lorsque toutes les commutations dans le circuit électrique du moteur électrique ont lieu à certains moments, par exemple lors de l'automatisation du processus de démarrage des moteurs électriques sans surveillance de la vitesse ou du courant. La durée des intervalles est déterminée et peut être ajustée par les paramètres du relais temporisé.
Ce type de contrôle est utilisé lorsque toutes les commutations dans le circuit électrique du moteur électrique ont lieu à certains moments, par exemple lors de l'automatisation du processus de démarrage des moteurs électriques sans surveillance de la vitesse ou du courant. La durée des intervalles est déterminée et peut être ajustée par les paramètres du relais temporisé.
Le contrôle du temps a reçu la plus grande diffusion dans l'industrie en raison de la simplicité et de la fiabilité des relais de temps électromagnétiques et électroniques de production de masse.
Ainsi, à partir de la fig. 1, a et b, on peut voir qu'en fermant le contact K du contacteur de ligne, toute la résistance du rhéostat est incluse dans le circuit d'induit, égale à R1 + R2 + R3, et l'inclusion des sections de résistance de démarrage peut se produire à certains intervalles de temps t1, t2 et t3 à certains régimes moteur n1, n2, n3 et lorsque le courant d'appel chute à la valeur de consigne I2. Les intervalles de temps sont choisis de manière à ce qu'à chaque court-circuit ultérieur de la résistance, le courant du moteur ne dépasse pas le I1 admissible.
Lorsque le moteur accélère de n = 0 à n1, le courant diminue jusqu'à I2 en raison d'une augmentation de la force électromotrice arrière. Après un intervalle de temps t1, le contact K1 se ferme, shuntant la résistance R1, ce qui entraîne une diminution de la résistance du rhéostat vers R2 + R3, une nouvelle augmentation du courant vers I1, etc. A la fin du démarrage, le moteur accélère jusqu'à la vitesse nominale, le rhéostat de démarrage est complètement retiré.
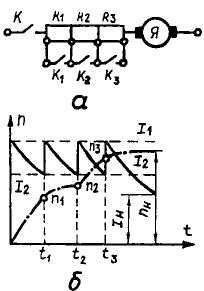
Riz. 1. Circuits de commande du moteur en fonction du temps : a — rhéostat de démarrage du moteur à courant continu, b — schéma de démarrage
Considérez certains circuits de commande de moteur en fonction du temps.
Dans la commande en fonction du temps d'un moteur à induction à rotor bobiné (Fig. 2), la temporisation nécessaire pour court-circuiter les étapes individuelles du rhéostat de démarrage est fournie par des relais temporisés à pendule, dont le nombre est égal au nombre de pas. Le schéma fonctionne comme suit.
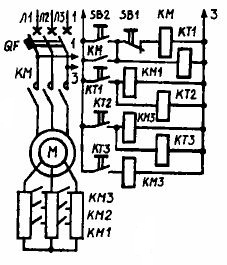
Riz. 2. Circuit de commande en fonction du temps d'un moteur à induction à rotor bobiné
Lorsque vous cliquez sur bouton SB1 reçoit l'alimentation de la bobine du contacteur sur la ligne KM, qui relie le stator du moteur au secteur. Dans le même temps, le rhéostat de sortie est entièrement introduit. Avec le contacteur, le relais temporisé KT1 est activé, ce qui après un certain intervalle de temps ferme le contact dans le circuit de la bobine du contacteur KM1.
Le contacteur actionne et ferme la première section du rhéostat pour démarrer le rotor. En même temps, le relais temporisé KT2 s'allume, ce qui ferme ses contacts avec un retard et active la bobine KM2 et le relais temporisé KTZ. Les contacts du contacteur KM2 court-circuitent le deuxième étage KM2 du rhéostat de démarrage.De plus, avec une temporisation, le contact du relais KTZ est déclenché, allumant l'enroulement KMZ, ce qui provoque un court-circuit du dernier étage du rhéostat de démarrage KMZ, et le moteur continue de fonctionner à l'avenir, comme avec un rotor d'écureuil.
Le moteur est arrêté en appuyant sur le bouton SB, et en cas de surcharge, le moteur est arrêté en relâchant l'interrupteur QF. Cela coupe le contacteur de ligne, son contact auxiliaire KM et tous les contacteurs d'accélération et les relais temporisés non temporisés. La chaîne est prête pour le prochain cycle.
Pour démarrer la vitesse de ralenti d'un moteur à induction avec une puissance accrue avec la commutation de l'enroulement du stator d'une étoile à un triangle, vous pouvez utiliser le schéma de la Fig. 3. La commutation dans ce circuit se fait automatiquement en fonction du temps En appuyant sur le bouton SB2, l'enroulement du stator est connecté au réseau par le contacteur KM. Dans le même temps, le relais temporisé KT et la bobine KY sont connectés au réseau, qui connecte l'enroulement du stator à une étoile à l'aide de trois contacts dans le circuit de puissance.
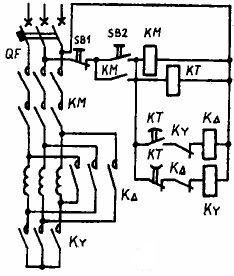
Riz. 3. Circuit de commande en fonction du temps d'un moteur à induction en passant de Y à Δ
Le moteur démarre et accélère à tension réduite. Après un intervalle de temps prédéterminé, le relais KT désactive le contacteur KY et active la bobine du contacteur KΔ reliant l'enroulement du stator au triangle. Comme il y a un contact auxiliaire KY dans le circuit de la bobine K∆, la fermeture du contacteur K∆ ne peut se produire avant la fermeture du contacteur KMY.
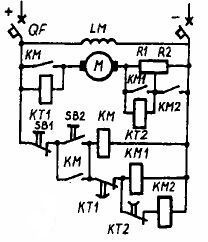
Le démarrage pas à pas des moteurs à induction multi-vitesses est plus économique et se fait en fonction du temps.Considérons un exemple de démarrage pas à pas d'un moteur à deux vitesses avec un seul enroulement (Fig. 4). L'enroulement du stator passe du triangle à l'étoile double à double vitesse.
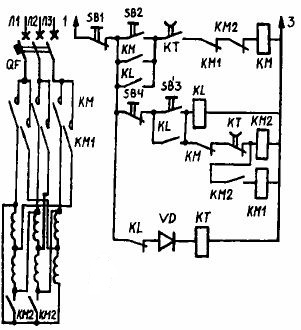
Riz. 4. Circuit de commande en fonction du temps de démarrage du moteur à induction
Le moteur est mis en marche par le contacteur KM au premier étage de vitesse, et par les contacteurs KM2 et KM1 au second. Pour allumer le moteur à la première vitesse, l'appui sur le bouton SB2 active la bobine du contacteur KM et ses contacts de puissance KM dans le circuit principal. L'enroulement de stator connecté en triangle est connecté au réseau. La bobine du relais temporisé KT est excitée et son contact de fermeture (dans le circuit de la bobine KM) est fermé.
 Un démarrage pas à pas du moteur à la deuxième vitesse de rotation est effectué à l'aide d'un relais intermédiaire K dont le circuit est fermé par le bouton de démarrage SB3. Les contacts de fermeture K contournent les deux boutons de démarrage et le contact d'ouverture K désexcite le relais temporisé KT. Le contact de fermeture KT dans le circuit de la bobine KM s'éteint avec un retard de retour, grâce auquel la bobine KM dans la première période de démarrage s'avère fermée et le moteur s'allume à la première vitesse.
Un démarrage pas à pas du moteur à la deuxième vitesse de rotation est effectué à l'aide d'un relais intermédiaire K dont le circuit est fermé par le bouton de démarrage SB3. Les contacts de fermeture K contournent les deux boutons de démarrage et le contact d'ouverture K désexcite le relais temporisé KT. Le contact de fermeture KT dans le circuit de la bobine KM s'éteint avec un retard de retour, grâce auquel la bobine KM dans la première période de démarrage s'avère fermée et le moteur s'allume à la première vitesse.
Le contact du bloc KM dans le circuit des bobines KM2 et KM1 s'ouvre. Ces bobines sont également déconnectées du contact ouvert KT, qui est temporisé au retour. Après un certain temps, le contact de fermeture KT fermera la bobine KM, et son contact d'ouverture fermera les bobines des contacteurs de la deuxième vitesse de rotation KM1 et KM2. Leurs contacts principaux dans le circuit d'alimentation commuteront l'enroulement du stator en double étoile et le connecteront au secteur.
Par conséquent, le moteur accélère d'abord en première vitesse, puis passe automatiquement en deuxième vitesse. Notez que la connexion préliminaire de l'enroulement du stator à une double étoile et son inclusion ultérieure dans le réseau s'effectuent d'abord en activant deux contacts de fermeture de l'alimentation KM2, puis trois contacts principaux de fermeture KM1. Une telle séquence de commutation est obtenue par le fait que la bobine KM1 est mise sous tension par le contact du bloc de fermeture KM2. Le moteur est arrêté en appuyant sur le bouton «Stop», marqué sur le schéma par la lettre SB1.
En figue. La figure 5 montre un schéma du démarrage automatique d'un moteur à courant continu à excitation parallèle en fonction du temps. En fermant le disjoncteur QF, le moteur est préparé pour le démarrage. Le courant traverse le circuit constitué de l'enroulement du relais temporisé KT1, de l'induit du moteur M et de deux étages du rhéostat de démarrage R1 + R2.
Riz. 5. Circuit de commande en fonction du temps d'un moteur à courant continu excité
En raison de la résistance élevée de la bobine du relais KT1, le courant dans ce circuit est très faible et n'a aucun effet sur le moteur, mais le relais lui-même est déclenché et son contact ouvert dans le circuit du contacteur KM1 s'ouvre. Dans la bobine du deuxième relais temporisé KT2, connecté en parallèle avec la résistance R1, un si petit courant est dérivé qu'il ne peut pas être activé. L'enroulement de champ LM du moteur s'allume également.
Le moteur est démarré en appuyant sur le bouton SB2.En même temps, le contacteur KM et son contact dans le circuit d'induit du moteur sont activés. Le grand courant de démarrage est limité par deux étages de rhéostat R1 et R2.Une partie de ce courant est dérivée dans la bobine du relais KT2 et lorsqu'il est actionné, il ouvre son contact KT2 dans le circuit du contacteur KM2. Simultanément à la fermeture du circuit d'induit M, le contact de travail du contacteur KM court-circuite la bobine du relais KT1.
Après un certain intervalle de temps lorsque le relais revient, KT1 fermera son contact KT1 dans le circuit du contacteur KM1. Ce contacteur avec son contact de travail KM1 va court-circuiter le premier étage R1 du rhéostat de démarrage et l'enroulement du relais temporisé KT2. Avec un retard de retour, ses contacts de travail KT2 activeront le contacteur KM2 qui, avec ses contacts de travail KM2, court-circuitera le deuxième étage R2 du rhéostat de démarrage. Ceci termine le démarrage du moteur.
Lorsque le bouton SB1 est enfoncé, le contacteur KM se déclenche et déconnecte son contact principal dans le circuit d'induit. L'armature reste sous tension, mais il s'avère qu'elle est connectée en série avec la bobine de relais KT1, grâce à laquelle un petit courant la traverse. Le relais KT1 fonctionnera, ouvrira son contact dans le circuit des contacteurs KM1 et KM2, ils s'éteindront et ouvriront leurs contacts, les résistances de court-circuit R1 et R2. Le moteur s'arrête, mais son enroulement de champ reste connecté au secteur et ainsi le moteur est préparé pour le prochain démarrage. L'arrêt complet du moteur se fait en éteignant l'interrupteur d'entrée automatique BB.
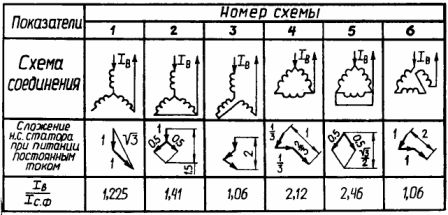
Le freinage dynamique des moteurs s'effectue également en fonction du temps. Pour le freinage dynamique, par exemple, un moteur à induction, l'enroulement du stator est déconnecté du réseau de courant alternatif et, selon l'un des schémas présentés dans le tableau 1, est connecté à une source de courant continu.Dans l'industrie forestière et du travail du bois, le courant continu est obtenu à partir de redresseurs à semi-conducteurs spéciaux. Dans ce cas, il n'y a pas besoin d'une source spéciale de courant continu.
Lorsque l'enroulement du stator est activé selon l'un des schémas (voir tableau 1), un champ magnétique stationnaire est créé dans l'enroulement du redresseur. Dans un champ stationnaire, le rotor du moteur continue de tourner par inertie. Dans ce cas, une force électromotrice et un courant alternatifs seront créés dans le rotor du moteur, ce qui excitera un champ magnétique alternatif. Le champ magnétique changeant du rotor lorsqu'il interagit avec le champ stationnaire du stator crée un couple de freinage. Dans ce cas, l'énergie cinétique stockée du rotor et de l'entraînement est convertie en énergie électrique dans les circuits du rotor, et cette dernière en chaleur.
L'énergie thermique est dissipée du circuit du rotor vers l'environnement. La chaleur générée dans le rotor chauffera le moteur. La quantité de chaleur dégagée dépend du courant dans l'enroulement du stator lorsqu'il est alimenté en courant continu. Selon le schéma adopté pour allumer l'enroulement du stator lorsqu'il est alimenté en courant continu, le rapport courant sur courant de phase du stator sera différent. Les rapports de ces courants pour différents schémas de commutation sont indiqués dans un tableau. 1
Le circuit de freinage dynamique d'un moteur à induction est illustré à la fig. 6.
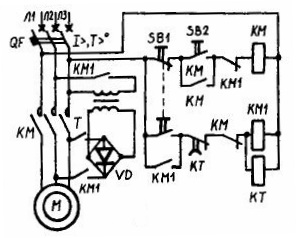
Riz. 6. Schéma de freinage dynamique d'un moteur à induction
En appuyant sur le bouton de démarrage SB1, le contacteur de ligne KM met le moteur sous tension sur le réseau alternatif, son contact de blocage de fermeture commute la bobine KM en auto-alimentation.Le contact d'ouverture KM déconnecte le circuit d'alimentation du contacteur de frein KM1 et du relais temporisé KT. Lorsque le bouton SB est enfoncé, le contacteur de ligne KM est mis hors tension et le circuit de la bobine du contacteur KM1 est mis sous tension.
Le contacteur KM1 inclut ses contacts KM1 dans le circuit du transformateur T et du redresseur V, à la suite de quoi l'enroulement du stator sera alimenté en courant continu. Pour éviter une commutation indépendante aléatoire du contacteur de ligne, le contact d'ouverture du bloc KM1 est connecté en série avec sa bobine KM. Simultanément au contacteur de frein, le relais temporisé KT est activé, qui est configuré pour que son contact ouvert KT éteindre la bobine KM1 et le relais temporisé après un certain intervalle de temps. Le réglage du relais temporisé KT est choisi pour que le temps d'actionnement du relais tkt soit égal à la somme du temps de décélération du moteur tT et du temps de déclenchement correct du contacteur KM1.