Une méthode intuitive pour concevoir des schémas de contrôle
 Méthode intuitive - une méthode de développement de schémas de contrôle basée sur l'expérience acquise dans diverses organisations de conception dans l'automatisation de divers mécanismes. Il est basé sur l'intuition d'ingénierie du concepteur.
Méthode intuitive - une méthode de développement de schémas de contrôle basée sur l'expérience acquise dans diverses organisations de conception dans l'automatisation de divers mécanismes. Il est basé sur l'intuition d'ingénierie du concepteur.
Seul celui qui a absorbé toute l'expérience antérieure et a certaines capacités en termes d'élaboration de schémas, qui peut penser de manière abstraite et raisonner de manière logique, peut parfaitement maîtriser cette méthode. Malgré sa complexité, la plupart des concepteurs électriques utilisent largement la méthode intuitive.
Par exemple, considérons un schéma cinématique simplifié d'un levier poussoir (Fig. 1). Lorsque la roue 5 tourne dans le sens des aiguilles d'une montre, le levier 4 fait tourner le levier 1 autour de l'axe O, forçant ainsi le sabot 3 avec le levier 2 à translater. Avec une rotation supplémentaire de la roue 5, le sens de déplacement du levier 1 change et le sabot revient à sa position d'origine, après quoi le moteur doit s'arrêter.
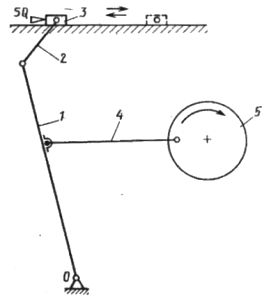
Riz. 1. Schéma de principe de la commande du poussoir à levier
Le mécanisme considéré est un représentant typique d'un dispositif de poussée.Au premier cycle, le mécanisme est activé et fonctionne. Dans la deuxième mesure, cela ne fonctionne pas. Le cycle dans lequel le mécanisme ne fonctionne pas est appelé zéro. Bien que la chaussure soit entièrement alternative (avant et arrière), un moteur électrique non réversible peut être utilisé pour la propulsion.
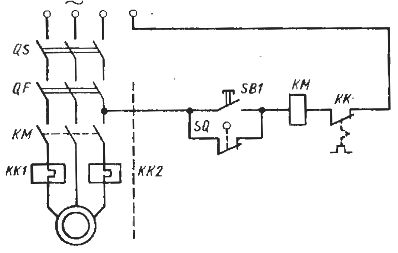
Le circuit de commande du moteur électrique à levier-piston se compose de deux parties (sur la Fig. 1, elles sont séparées par une ligne pointillée): le circuit de puissance et le circuit de commande.
Considérez le but des éléments du circuit de puissance. Le courant triphasé est fourni au commutateur QS, qui coupe l'alimentation du moteur électrique en cas de réparation ou de détérioration du démarreur magnétique. Ensuite, le courant traverse le disjoncteur dont le déclencheur QF est représenté sur le schéma. Il est conçu pour protéger et déconnecter l'alimentation du variateur en cas de courants de court-circuit. Les contacts principaux du démarreur magnétique KM allument ou éteignent l'enroulement du moteur électrique M.
Les relais thermiques KK1 et KK2, dont les éléments chauffants sont représentés dans les circuits de puissance, sont destinés à protéger le moteur électrique des surcharges prolongées :
Le schéma de contrôle fonctionne comme suit. Lorsque vous appuyez sur le bouton de démarrage SB1, la bobine du démarreur magnétique KM est excitée et donc les contacts du circuit d'alimentation de KM sont fermés et le courant électrique pénètre dans l'enroulement du moteur. Le rotor du moteur tourne et le tambour commence à avancer. En même temps, il s'éloigne du levier du fin de course SQ et ses contacts se ferment.
Lorsque le bouton de démarrage SB1 est relâché et que ses contacts s'ouvrent, la bobine KM du démarreur magnétique sera alimentée par les contacts de l'interrupteur de fin de course SQ.Après avoir avancé, puis reculé, le piston appuiera sur le levier de l'interrupteur de fin de course SQ, ses contacts s'ouvriront et la bobine de KM s'éteindra. Cela entraînera l'ouverture des contacts KM du circuit d'alimentation et l'arrêt du moteur électrique.
Le circuit considéré contient des circuits de puissance et de commande. À l'avenir, seuls les schémas de contrôle seront pris en compte.
Par fonction, c'est-à-dire par destination, tous les éléments impliqués dans le fonctionnement du circuit peuvent être divisés en trois groupes : contacts de commande, éléments intermédiaires et éléments exécutifs.
Les contacts de commande sont les éléments avec lesquels les commandes sont émises (boutons de commande, interrupteurs, interrupteurs de fin de course, convertisseurs primaires, contacts de relais, etc.).
Le nom même des éléments intermédiaires indique qu'ils occupent une position intermédiaire entre les éléments de contrôle et d'exécution. Dans les circuits à contact de relais, ils comprennent les relais temporisés et les relais intermédiaires, et dans les circuits sans contact - des portes logiques.
Les éléments exécutifs sont des mécanismes exécutifs. Cependant, lors du développement de circuits de commande, les mécanismes d'entraînement eux-mêmes (moteurs électriques ou éléments chauffants) ne sont pas utilisés, mais les appareils qui les incluent, c'est-à-dire démarreurs magnétiques, contacteurs, etc.
Tous les contacts de commande, selon leur principe de fonctionnement, sont divisés en cinq types : contact de démarrage à action courte (PC), contact de démarrage à action longue (PD), contact d'arrêt à action courte (OK), contact d'arrêt à action longue (OD ), contact start-stop (logiciel). Ces contacts sont appelés les principaux.
Les cyclogrammes du fonctionnement de tous les contacts typiques dans le contrôle des mécanismes cycliques sont illustrés à la fig. 2.
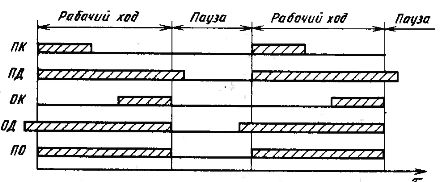
Riz. 2.Cyclogramme des contacts de contrôle
Chacun des cinq contacts commence à fonctionner (se ferme) et se termine (s'ouvre) à des moments précis. Ainsi, les contacts de démarrage commencent leur travail avec le début de la course de travail, mais le contact YAK cesse de fonctionner pendant la course de travail, OD - pendant la pause, c'est-à-dire qu'ils ne diffèrent les uns des autres qu'au moment de l'extinction ( ouverture).
Les contacts d'arrêt, qui, contrairement aux contacts de démarrage, cessent de fonctionner en même temps que la fin de la course de travail, diffèrent par les moments d'inclusion (fermeture). Le contact d'arrêt OK commence son fonctionnement pendant la course de travail et le contact OD - pendant la pause. Seul le contact du logiciel commence son travail avec le début du cours de travail et se termine avec sa fin.
À l'aide des cinq contacts principaux considérés, il est possible d'obtenir quatre schémas de contrôle des éléments exécutifs et intermédiaires, appelés schémas typiques (Fig. 3).

Riz. 3. Schémas de contrôle typiques pour les circuits exécutifs et intermédiaires
Le premier circuit typique (Fig. 3, a) n'a qu'un seul contact de contrôle logiciel. S'il est fermé, alors le courant électrique circule dans l'actionneur X, et s'il est ouvert, aucun courant ne circule. Le contact PO a sa propre signification et tous les autres contacts doivent être utilisés par paires (démarrage et arrêt).
Le deuxième circuit typique comporte deux contacts de commande à action continue : PD et OD (Fig. 3, b).
Le troisième circuit typique est constitué du contact de démarrage de l'ordinateur et du contact d'arrêt OD, en plus des contacts de commande, ce circuit doit inclure un contact de blocage x, à travers lequel l'actionneur X continuera à être alimenté après le contact de démarrage du ordinateur est ouvert (Fig. 3, c).
Le quatrième schéma typique est basé sur deux contacts à court terme: démarrer un ordinateur et arrêter OK, connectés en parallèle (Fig. 3, d).
Les quatre schémas typiques donnés permettent (comme à partir de cubes) de composer des schémas parallèles-séries complexes pour contrôler les contacts. Ainsi, par exemple, le schéma de commande de levier considéré (voir Fig. 1) est basé sur le quatrième schéma typique. Il utilise les boutons-poussoirs SB1 comme contact de démarrage à court terme et l'interrupteur de fin de course SQ comme contact d'arrêt à court terme.
Lors de l'élaboration d'un schéma de contrôle à l'aide d'une méthode intuitive, il est nécessaire de déterminer correctement le type de contact de contrôle, c'est-à-dire la durée de son action.
Considérons un exemple de développement d'un schéma de contrôle à l'aide d'une méthode intuitive utilisant des schémas typiques.
Supposons qu'il faille développer un dispositif semi-automatique de commande d'un inducteur et un dispositif de pulvérisation d'une installation destinée à chauffer un produit avec des courants haute fréquence puis à le refroidir avec des jets d'eau. Le temps de chauffage du produit dans l'inducteur est de 12 s et le temps de refroidissement est de 8 h.Le produit est installé manuellement dans l'inducteur.
Dans un premier temps, nous analyserons le fonctionnement du dispositif semi-automatique et déterminerons tous les éléments exécutifs et intermédiaires. Le travailleur installe manuellement le produit dans l'inducteur et appuie sur le bouton de démarrage.À ce stade, l'inducteur s'allume et le chauffage du produit commence. Dans le même temps, le relais temporisé doit également s'allumer en tenant compte du temps de chauffage (12 s).
Ce relais temporisé (plus précisément ses contacts) éteint l'inducteur et allume l'arroseur, qui fournit de l'eau pour le refroidissement. En même temps, un deuxième relais doit être activé pour décompter le temps de refroidissement, c'est-à-dire pour éteindre le pulvérisateur. De cette manière, il est nécessaire de contrôler quatre éléments : un inducteur, un dispositif de pulvérisation et deux relais temporisés.
L'inductance est allumée et éteinte par l'intermédiaire d'un contacteur, c'est pourquoi il est nécessaire de commander ce dernier. Le pulvérisateur est commandé par une électrovanne.
Désignons respectivement la bobine (bobine) du contacteur KM1, la bobine de l'électrovanne KM2 et les bobines des relais temporisés KT1 et K.T2. Ainsi, nous avons deux actionneurs : KM1 et KM2 et deux éléments intermédiaires : KT1 et KT2.
De l'analyse effectuée, il ressort que le chauffage doit commencer en premier, c'est-à-dire que la bobine KM1 sera excitée. Le bouton de déclenchement SB (action courte) est utilisé comme contact de démarrage. Ainsi, le troisième ou le quatrième schéma typique est applicable.
Laissez l'inductance être déconnectée des contacts du relais temporisé KT1.1, qui dans ce cas sont des contacts à action prolongée. Par conséquent, nous choisissons le troisième schéma typique. Simultanément à l'enroulement du démarreur magnétique KM1, il est nécessaire d'allumer le relais temporisé KT1, ce qui est très facile à faire en les connectant en parallèle.
Considérez le fonctionnement du circuit résultant (Fig. 4, a).
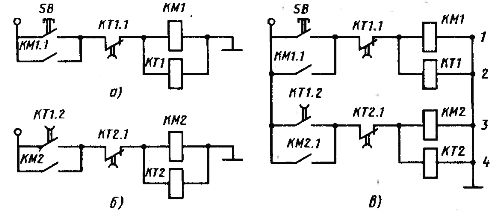
Riz. 4.Circuits de commande : a — inductance et relais pour le temps de chauffage, b — dispositif d'arrosage et temps de refroidissement du relais, c — installation dans son ensemble
Lorsque vous appuyez sur le bouton de démarrage SB, la bobine du contacteur KM1 est excitée, c'est-à-dire que le chauffage du produit commence. En même temps, la bobine du relais temporisé KT1 est excitée et commence à décompter le temps de chauffage. À l'aide du contact de blocage KM1.1, la tension de la bobine KM1 sera maintenue même après avoir relâché le bouton de déclenchement SB, c'est-à-dire après avoir ouvert ses contacts.
Une fois le temps de chauffage écoulé, le relais temporisé KT1 fonctionnera, son contact KT1.1 s'ouvrira. Cela entraînera l'arrêt de la bobine KM1 (le chauffage du produit s'arrêtera). Le pulvérisateur doit maintenant être allumé. Il peut être activé par le relais temporisé KT1 en fermant le contact. Lorsque le pulvérisateur est allumé, le relais temporisé KT1 est désactivé. Par conséquent, le contact de fermeture KT1.1 sera un contact de courte durée. Par conséquent, nous utiliserons à nouveau le troisième schéma typique.
En même temps que le pulvérisateur, il est nécessaire d'activer le relais temporisé KT2, qui décompte le temps de refroidissement. Pour cela, nous allons utiliser la technique appliquée et connecter la bobine du relais temporisé KT2 en parallèle avec la bobine KM2. Ainsi, nous obtenons le deuxième schéma de contrôle (Fig. 4, b). En combinant les deux circuits (Fig. 4, a et b), nous obtenons un schéma de contrôle général (Fig. 4, c).
Considérons maintenant le fonctionnement du circuit dans son ensemble (Fig. 4, c). Lorsque vous appuyez sur le bouton de démarrage SB, les bobines du contacteur KM1 et du relais temporisé KT1 sont excitées et le produit commence à chauffer.Après 12 s, le relais temporisé KT1 fonctionnera et ses contacts dans le circuit 1 s'ouvriront et dans le circuit 2 se fermeront. Le produit commencera à refroidir. Simultanément à la bobine KM2 de l'électrovanne, le relais temporisé T2 sera excité, décomptant le temps de refroidissement.Lorsque le contact KT2.1 (circuit 3) s'ouvre, la vanne KM2 et le relais temporisé KT2 sont désactivés, et le circuit revient à sa position d'origine.
Le schéma de contrôle des inducteurs et des gicleurs résultant a été développé à l'aide d'une méthode intuitive. Cependant, rien ne prouve que ce schéma sera correct et optimal. La question de l'opérabilité du circuit ne peut être résolue qu'après sa production et une vérification expérimentale minutieuse. C'est précisément le plus gros inconvénient de la méthode intuitive. La lacune notée est absente de la méthode d'analyse. La méthode analytique pour développer des schémas de contrôle sera discutée dans le prochain article.