Electroaimants de freinage pour grues
 Electroaimants de frein conçus pour contrôler les freins mécaniques. À leur tour, ces freins servent à arrêter les mécanismes de la grue dans une position donnée ou à limiter la distance de freinage en cas de fuite avec le moteur d'entraînement éteint.
Electroaimants de frein conçus pour contrôler les freins mécaniques. À leur tour, ces freins servent à arrêter les mécanismes de la grue dans une position donnée ou à limiter la distance de freinage en cas de fuite avec le moteur d'entraînement éteint.
Les freins à sabot et à bande sont les plus largement utilisés pour les mécanismes de grue (si nécessaire, ont des moments de freinage supérieurs à 10 kN NS m) - ressort et parfois charge. Les freins à disque sont moins utilisés (moment de freinage jusqu'à 1 kN x m) et coniques (moment de freinage jusqu'à 50 N NS m).
Les bobines des électro-aimants de frein s'allument simultanément avec le moteur électrique et desserrent le frein. Lorsque le moteur électrique est éteint, les bobines du solénoïde de frein sont simultanément désaérées et le freinage se produit - le frein est serré sous l'action d'un ressort ou d'une charge.
Les électroaimants de frein à courant alternatif sont utilisés pour les freins des mécanismes de grue: série KMT triphasée (Fig. 1) - course longue (course d'induit maximale de 50 à 80 mm), série MO monophasée (Fig.2)-course courte (course de la tige de frein de 3 à 4 mm), courant continu : séries KMP et VM — course longue (course d'induit de 40 à 120 mm), série MP (Fig. 3) — course courte (course d'ancrage de 3 à 4,5 mm).
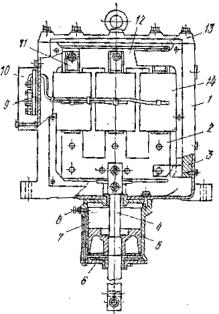
Riz. 1. Électro-aimant de frein série KMT : 1 — boîtier, 2 — ancre, 3 — guides, 4 — tige, 5 — piston, 6 ~ couvercle d'amortisseur, 7 — cylindre d'amortisseur, 8 — vis de réglage de compression, 9 — bornier, 10 — couvercle du bornier, 11 — supports de bobine en laiton, 12 — culasse, 13 — couvercle, 14 — bobine
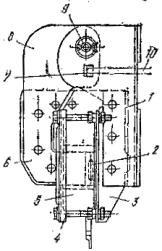
Riz. 2. Électroaimant de frein de la série MO : 1 - culasse fixe, 2 - court-circuit, 3 - carré, 4 - couvercle, 5 - bobine, .6 - armature, 7 - bande, 8 - joue, 9 - axe, 10 - poussée
Les principaux paramètres des électroaimants de frein à armature mobile en translation (KMT, KMP, VM et MP) sont la force de traction et la course de l'armature, et pour les électroaimants à soupape de la série MO, le moment de l'électroaimant et l'angle de rotation de l'armature.
Les solénoïdes de frein de toutes les séries ci-dessus sont indépendants appareils électriquesarticulé avec freins.
Freins à sabot de la série TS avec électroaimants à course courte et bateaux de frein à ressort TKP (voir Fig. 3) avec bobines CC intégrées. Pour ces freins, le levier 1 est moulé avec le boîtier du solénoïde et l'armature du solénoïde est coulée avec le levier.
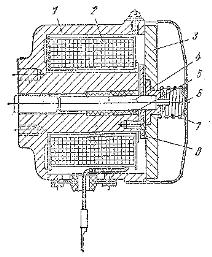
Riz. 3. Électroaimant de frein de la série MP : 1 — corps, 2 — bobine, 3 — armature, 4 — broche, 5 — ces otolithes et douilles, 6 — couvercle, 7 — ressort d'amortissement, 8 — pôle
Les bobines des solénoïdes de frein AC sont connectées en parallèle et sont conçues pour la pleine tension de ligne. Lorsqu'ils sont allumés, un choc de courant important se produit: pour les électroaimants de la série KMT Azstart = (10-30) Aznumer, série MO - Azstart = (5-6) AzNo.
Lors de la sélection de dispositifs de protection tels que des fusibles, le courant d'appel doit être pris en compte. Le courant de démarrage est déterminé par les formules
Azstart = Cp / √3U
pour électroaimants triphasés
Istart = Sp / U
où, CNS — pleine puissance au moment du démarrage, VA, tension secteur, V.
Les bobines de solénoïde de frein à courant continu peuvent être connectées en série et en parallèle (excitation).
 Les électro-aimants de la bobine de connexion en série agissent rapidement en raison de leur faible inductance et de leur fonctionnement fiable car ils assurent le freinage, le mécanisme des bascules dans le circuit d'induit du moteur électrique. Leur inconvénient est la possibilité de faux freinages avec désinhibition ultérieure à très faible charge, par exemple au ralenti. Par conséquent, il est conseillé de les utiliser pour les mécanismes de grue avec des fluctuations relativement faibles de la charge et donc de l'amplitude du courant d'induit, par exemple pour les mécanismes de mouvement de grue.
Les électro-aimants de la bobine de connexion en série agissent rapidement en raison de leur faible inductance et de leur fonctionnement fiable car ils assurent le freinage, le mécanisme des bascules dans le circuit d'induit du moteur électrique. Leur inconvénient est la possibilité de faux freinages avec désinhibition ultérieure à très faible charge, par exemple au ralenti. Par conséquent, il est conseillé de les utiliser pour les mécanismes de grue avec des fluctuations relativement faibles de la charge et donc de l'amplitude du courant d'induit, par exemple pour les mécanismes de mouvement de grue.
Les valeurs de courant pour les mécanismes de levage sont d'environ 40% du courant nominal du moteur électrique et pour les mécanismes de déplacement - d'environ 60%.Par conséquent, l'amplitude de la force de traction ou du couple des freins à bobine est systématiquement indiquée dans les catalogues pour deux valeurs du courant de bobine : pour 40 et 60 % du nominal (respectivement pour les mécanismes de levage et de mouvement).
Si, lors du démarrage du moteur électrique, la valeur minimale du courant traversant la bobine de l'électroaimant de freinage est inférieure à 40 ou 60% de la valeur nominale, il est alors nécessaire de réduire le couple de freinage aux valeurs indiquée pour la valeur de courant de 40 ou 60 % de la valeur nominale (en réduisant la force du ressort de frein ou le poids du frein).
 Les électro-aimants de freinage à courant continu avec des bobines de connexion en parallèle ne présentent pas les inconvénients ci-dessus. Cependant, du fait de l'inductance importante des bobines, ces électroaimants sont inertiels. De plus, ils sont moins fiables, car lorsque le circuit d'induit du moteur électrique est rompu, les enroulements de ces électroaimants continuent de circuler autour du courant, et le frein reste sans frein.
Les électro-aimants de freinage à courant continu avec des bobines de connexion en parallèle ne présentent pas les inconvénients ci-dessus. Cependant, du fait de l'inductance importante des bobines, ces électroaimants sont inertiels. De plus, ils sont moins fiables, car lorsque le circuit d'induit du moteur électrique est rompu, les enroulements de ces électroaimants continuent de circuler autour du courant, et le frein reste sans frein.
Le premier inconvénient peut être éliminé en forçant, pour lequel, en série avec la bobine, une résistance économique est incluse, qui lors de la rétraction de l'armature électromagnétique, manœuvre le relais de courant avec les contacts d'ouverture et entre dans le circuit électrique après l'armature de l'électroaimant est retiré, réduisant le courant dans la bobine et son échauffement en conséquence.
Le deuxième inconvénient est éliminé en connectant la bobine du relais de courant en série avec l'armature du moteur électrique et en la fermant en série avec le circuit de bobine de l'électroaimant. Lors de l'utilisation du forçage, le temps de forçage ne doit pas dépasser 0,3 à 0,6 s.
Pour alimenter les électroaimants en courant continu à partir d'un réseau de courant alternatif, des redresseurs demi-onde standard avec des diodes pour un courant allant jusqu'à 3 A et un groupe de condensateurs d'une capacité de 2 à 14 μF sont utilisés, ce qui fournit des paramètres de sortie correspondant à les conditions des enroulements d'alimentation des électroaimants.
Les électroaimants de freinage à courant alternatif sont largement utilisés pour les installations de grues, mais la pratique de leur travail a montré qu'ils présentaient un certain nombre d'inconvénients: résistance à l'usure relativement faible, courants de commutation de bobine importants 7 à 30 fois supérieurs à leurs courants nominaux (avec des armatures entièrement rétractées ), chocs violents lors du freinage et du relâchement dus au manque de régulation de la douceur du processus de freinage, dommages aux bobines dus à une surchauffe avec rétraction incomplète de l'armature.
 Un inconvénient commun aux électroaimants de freinage CC et CA est l'imperfection des caractéristiques de traction: au début de la course de l'armature, développez la plus petite force de traction et à la fin - la plus grande.
Un inconvénient commun aux électroaimants de freinage CC et CA est l'imperfection des caractéristiques de traction: au début de la course de l'armature, développez la plus petite force de traction et à la fin - la plus grande.
Avec tous ces inconvénients, les électroaimants de freinage à courant continu sont plus fiables en fonctionnement que les électroaimants à courant alternatif. Par conséquent, pour contrôler les freins des mécanismes de grue avec un équipement à courant alternatif, des électroaimants de frein à courant continu alimentés par des redresseurs à semi-conducteurs sont souvent essayés.
Considérant que les électro-aimants de frein présentent un certain nombre d'inconvénients importants mentionnés ci-dessus, ils sont actuellement largement utilisés pour entraîner les freins de grue. propulseurs électro-hydrauliques à longue course.