Circuits de commande d'entraînement électrique
 En fonction de la vitesse des ascenseurs de passagers, les types de circuits de contrôle de puissance suivants sont adoptés :
En fonction de la vitesse des ascenseurs de passagers, les types de circuits de contrôle de puissance suivants sont adoptés :
-
les ascenseurs à basse vitesse ont des moteurs à cage d'écureuil ou à rotor de phase et un bouton ou un levier de commande,
-
ascenseurs à grande vitesse - moteurs à deux ou une vitesse commandés par des stations magnétiques ou des stations de commande à thyristor (TSU-R) avec des boutons de commande,
-
ascenseurs à grande vitesse et à grande vitesse - moteurs à courant continu commandés par le système "générateur - moteur" avec différents schémas d'excitation ou par le système "convertisseur à thyristor - moteur" avec boutons,
-
des chaînes de cascades de vannes asynchrones (AVK) peuvent également être utilisées, dont l'utilisation permet d'augmenter l'efficacité. installation.
Les ascenseurs de passagers, en fonction du flux de passagers, de la hauteur de levage et du nombre d'ascenseurs desservant les passagers, sont divisés en commande simple et en groupe.
Les célibataires comprennent :
a) ascenseurs fonctionnant sur ordres simples et appels sans franchissement d'arrêts lors de la descente et de la montée des passagers,
b) ascenseurs avec embarquement des passagers à la descente, mais avec interdiction d'appels à la montée,
c) le même, mais avec enregistrement des appels lors de la descente avec leur exécution ultérieure.
Les ascenseurs exploités en groupe comprennent :
a) ascenseurs avec un seul bouton pour appeler les paliers, quel que soit le nombre d'ascenseurs installés (la double commande est plus souvent utilisée) et avec embarquement des passagers en descente,
b) le même, mais avec la collecte complète des passagers aux étages intermédiaires pour l'embarquement et le débarquement (généralement installés dans des bâtiments administratifs, éducatifs et autres).
De plus, il est très courant d'envoyer des ascenseurs dans un certain nombre de maisons et de quartiers entiers, lorsque l'état des circuits est surveillé à partir d'une console de répartition et que plusieurs ascenseurs sont contrôlés.
Quelle que soit la vitesse des ascenseurs, qu'ils soient contrôlés individuellement ou en groupe, les éléments nécessaires de la plupart de leurs schémas sont les suivants:
-
boutons autoréglables, boutons collants ou de fermeture pour appeler les cabines et donner un ordre depuis la cabine,
-
divers capteurs de sélection et dispositifs d'adaptation de butée précise pour enregistrer l'emplacement de la cabine et l'état des circuits électriques,
-
capteurs et verrouillages de l'état des câbles de levage, de l'état de la mine et des portes de la cabine (ouvertes ou fermées),
-
fins de course pour limiter la vitesse et le degré de charge de la cabine,
-
des indicateurs de sens de déplacement de la cabine et, dans certains ascenseurs, la présence d'une charge dans la cabine.
Parmi ces éléments, nous nous attarderons plus en détail sur les dispositifs d'appariement de position (PSC), qui déterminent l'endroit où la voiture de mine doit s'arrêter lorsqu'un appel ou un ordre se produit, et son mouvement vers le haut ou vers le bas.Les éléments restants sont généralement diverses modifications d'interrupteurs de fin de course connus d'autres cours.
Structurellement, les dispositifs d'adaptation de position sont mis en œuvre sous la forme d'un ensemble de capteurs électromécaniques ou inductifs ou magnétiques (reed) à trois positions situés dans les mines, avec des signaux émis vers un relais ou un sélecteur sans contact dans la salle des machines (des CCP sont parfois mis en œuvre sous forme d'unités centrales de plancher situées dans la salle des machines) …
Les capteurs situés dans la mine interagissent avec les dérivations montées en cabine (pour l'électromécanique) ou les shunts magnétiques (pour les interrupteurs inductifs ou reed) et envoient des signaux à l'unité centrale au sol (copieur pas à pas ou relais relais) installée dans la salle des machines, et le ce dernier transmet et un circuit de commande — un signal pour exécuter la commande reçue.
Il est plus opportun de placer les capteurs des signaux de mouvement de la voiture vers le haut ou vers le bas de la voiture (moins de fils sont nécessaires) et d'installer des shunts magnétiques dans les mines aux points nécessaires. Dans ce cas, avec une commande numérique, le nombre de colonnes avec des shunts installés le long de l'arbre est égal au nombre de bits du numéro d'étage transmis en code binaire ou autre.
Les interrupteurs électromécaniques à trois positions sont déplacés vers l'une des positions correspondant au déplacement de la cabine vers le haut ou vers le bas, ou son arrêt, par un dispositif de curling.Dans ce cas, lorsque la cabine est en mouvement, les contacts des interrupteurs aux étages passés sont activés sur l'une des positions finales, préparant l'action de la chaîne d'appels et d'ordres, et lorsque la cabine s'arrête, l'interrupteur est déplacé vers la position médiane, éteignant le circuit de commande des contacteurs directionnels et excluant ainsi la cabine de quitter l'étage lorsque le bouton de commande ou d'appel est enfoncé par erreur.
Afin d'assurer un freinage relativement précis de la cabine d'ascenseur, des capteurs à commande magnétique (reed) inductifs ou scellés par contact ont récemment commencé à être utilisés dans leurs circuits de commande. Ces capteurs sont installés à la fois dans la mine et dans la cabine: dans la mine, il y a des capteurs de sélection (décélération) et dans la cabine, il y a un capteur pour un arrêt précis. Pour s'interfacer avec les capteurs, un shunt sélectif magnétique lanterne est placé sur le cockpit, et des shunts ferromagnétiques d'arrêt de précision sont placés dans la gaine (à chaque étage).
Les capteurs inductifs sont constitués d'un circuit magnétique ouvert en forme de U avec une bobine enfermée dans un boîtier. L'enroulement du relais exécutif est connecté en série avec celui-ci et une tension alternative (U) leur est appliquée.
Avec un circuit magnétique ouvert, le flux magnétique traversant la bobine est faible. D'où la f.e.m. et le courant d'auto-induction dans les fils de la bobine, ainsi que la résistance inductive (X) provoquée par celui-ci, sont pratiquement absents, de sorte que la résistance de la bobine est active (R). Le courant dans les bobines connectées en série est relativement important ; imite la fermeture des contacts dans le système de contact (le relais s'allume).
Lorsque le shunt ferme le circuit magnétique en forme de U, le flux magnétique traversant sa bobine augmente et donc la force électromotrice augmente. auto-inductance ainsi que la résistance inductive de la bobine qui lui est due. En conséquence, le courant dans les bobines connectées en série diminue, simulant l'ouverture du circuit dans le système de contact (le relais exécutif est désactivé).
Le commutateur Reed est un corps en forme de U dans lequel d'un côté de la rainure sont placés deux flacons en verre scellés avec un vide à l'intérieur et des contacts fixés sur des plaques à ressort qui sont connectées aux circuits de commande d'ascenseur respectifs. De l'autre côté de la fente se trouve un aimant permanent. L'élément de travail de ces capteurs est un shunt ferromagnétique qui traverse la coupe en forme de U lorsque la cabine d'ascenseur se déplace.
Le principe de fonctionnement de ces capteurs est le suivant : les forces de ressort des plaques de contact des interrupteurs Reed sont dirigées de sorte que si le champ d'un aimant permanent n'agit pas sur eux, alors les contacts normalement ouverts sont ouverts, et les contacts normalement les contacts fermés sont fermés, c'est-à-dire les circuits auxquels ces contacts sont connectés seront ouverts ou fermés.
Cette condition d'interrupteur à lames sera lorsque le shunt ferromagnétique est dans la rainure d'un corps en forme de U, car les lignes de champ magnétique de l'aimant permanent sont fermées à travers le shunt. Une fois que le shunt sort de la rainure, les lignes de champ magnétique sont fermées à travers les plaques, surmontant leur effet de ressort, et les contacts de l'interrupteur Reed, et donc les circuits auxquels ils sont connectés, passent dans l'état opposé.

À titre d'exemple reflétant les principales caractéristiques des schémas de contrôle d'ascenseur, considérons le schéma de contrôle pour un seul ascenseur sans arrêts associés illustré à la Fig. 1. L'ascenseur dessert quatre étages ; un moteur asynchrone à deux vitesses M est utilisé comme moteur exécutif.
La prise en compte des tours bas (Ml) ou hauts (B) du moteur est réalisée par les contacteurs correspondants Ml et B. Le sens de rotation du moteur est déterminé par les contacteurs B et H, décélération — par une résistance supplémentaire P, arrêt — par frein électromagnétique ET.
Utilisé comme interrupteurs d'étage capteurs inductifs sans contact (DTS, DTOV et DTON) connectés en série avec les bobines de relais (RIS, RITOV, RITON). Les capteurs TTP sont utilisés pour allumer l'entraînement de l'ascenseur à grande vitesse et donner une impulsion pour ralentir, tandis que les capteurs DTOV et DTON sont conçus pour arrêter précisément l'ascenseur au niveau de l'étage correspondant et sont placés sur la cabine, des shunts magnétiques pour eux sont installés dans l'arbre de l'arbre.
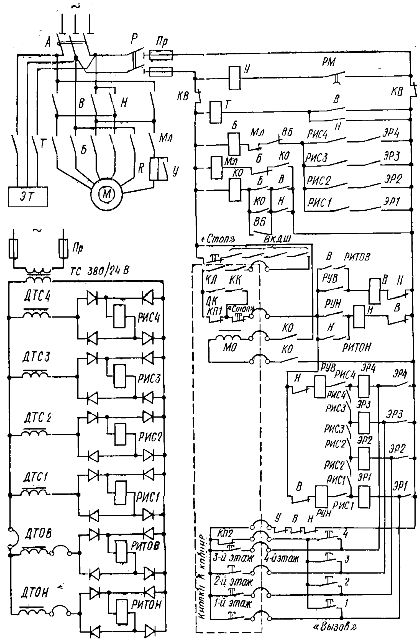
Riz. 1. Schéma de principe d'une seule commande d'ascenseur
Considérons le but des éléments restants du circuit et son fonctionnement en prenant l'exemple du déplacement d'une cabine avec un passager du 1er au 3ème étage, en supposant que l'automate A, le sectionneur P et les fins de course KB limitant la mouvement de la cabine vers le haut et vers le bas en mode d'urgence, sont fermés et la cabine est au rez-de-chaussée. Dans ce cas, les bobines du relais RIS, en plus du relais du premier étage, découlent du courant nominal.
Lorsque le bouton « 3e étage » est enfoncé, le circuit électrique suivant est formé : phase du réseau — pôle du sectionneur P — fusible Pr — interrupteur de fin de course KB — bouton « Stop » — verrouillage des portes de la mine D1 — D4 — contacts pour la tension le câble KK — le fin de course de sécurité KL — les interrupteurs de la porte de la cabine DK — les contacts du bouton «Stop» — le contact du bloc d'ouverture Н — la bobine du relais RUV — les contacts de fermeture des relais RIS4 et RISZ (les bobines de ces relais sont sous tension) — la bobine du relais d'étage ERZ — bouton «3ème étage» — blocs d'ouverture — contacts des contacteurs U, B, N — interrupteur de fin de course KB — fusible R — pôle de sectionneur P — phase du réseau.
Après l'actionnement des relais RUV et ER3, le contacteur de marche avant B, le contacteur de marche rapide B (sur le circuit de bobine B — contact de bloc ML — commutateur à grande vitesse VB — contacts de relais RISZ et ER3) sont activés. Lorsque les contacts B et B sont fermés, le moteur est connecté au réseau, le contacteur T, la poulie de débrayage et le contacteur shunt KO, qui active le solénoïde shunt MO et prépare le circuit de la bobine du contacteur à petite vitesse Ml, sont allumé. La course se rétracte, libérant le levier de verrouillage et la cabine commence à se déplacer.
Lorsque la cabine approche du troisième étage, le shunt ferromagnétique ferme la bobine du capteur TTSZ, sa résistance augmente et le relais RISZ disparaît, éteignant les relais ER3 et RUV. En conséquence, le contacteur B disparaît, ferme son contact, active le contacteur à basse vitesse Ml et le contacteur B reste allumé, car lorsque la voiture roule, le circuit magnétique du capteur de freinage précis n'est pas encore fermé, par conséquent, le Le contact RITOV n'est pas encore ouvert.Le moteur est arrêté à petite vitesse fonctionnant en mode générateur avec une résistance R. introduite dans une phase du stator.
Dès que le plancher de la cabine est aligné avec le plancher de l'étage, le shunt magnétique ferme le circuit magnétique de la bobine du capteur d'arrêt précis DTOV, le relais RITOV disparaît et les contacteurs B, puis KO et enfin ML sont mis en marche En conséquence, l'électroaimant du moteur et le frein sont déconnectés du secteur, le frein mécanique est serré et la cabine est arrêtée.
Apprendre un schéma collectif pour contrôler les ascenseurs avec des arrêts de dépassement uniquement lors de l'abaissement de la cabine ou un schéma entièrement collectif, c'est-à-dire lors du passage des arrêts pendant que la voiture monte et descend, il est nécessaire dans un schéma similaire à celui décrit à la fig. 1, introduire quelques ajouts. Par exemple, dans un circuit de moteur à deux vitesses, les capteurs inductifs d'identification, le relais RIS et les boutons d'appel et de commande à chaque étage sont inclus, comme illustré à la Fig. 2.
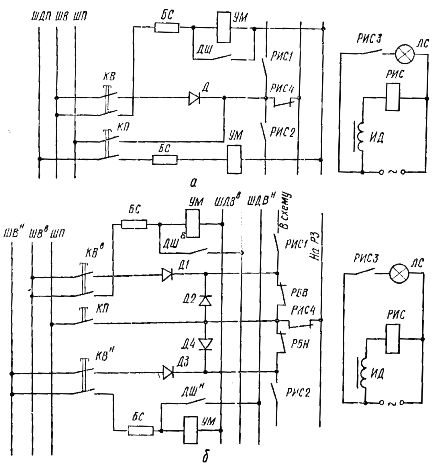
Riz. 2. Fragments d'ajouts aux systèmes de contrôle des ascenseurs collectifs (un étage)
Dans un schéma avec des arrêts de passage lors de l'abaissement de la cabine (Fig.2, a), les appels et les ordres sont donnés par des boutons collants séparés et peuvent donc être enregistrés à tout moment et transmis immédiatement au schéma, sauf pour la période de mouvement du cabine avec passagers levés lorsque le bus d'alimentation des contacts de transfert des appels vers le circuit exécutif est coupé par des contacts sélectifs du bus positif.
Dans le schéma de contrôle sélectif complet (Fig.2, b), il existe en outre des circuits de sonnerie pour les cabines d'embarquement (ШДВв) et de descente (ШДВн), les contacts des relais de blocage RBV et RBN sont connectés aux contacts du circuit exécutif du circuit de section sélectif .
Dans les schémas représentés sur les Fig. 1 et 2, en l'absence de cabine au sol, les bobines du capteur inductif ID et du relais RIS sont excitées. Par conséquent, lorsque vous appuyez sur le bouton de commande de commande ou appelez KV (ils sont maintenus à l'état activé par les aimants de retenue UM jusqu'à ce qu'ils soient surmontés par les contacts des portes de la mine à cet étage du DSh), un circuit se forme (non représenté sur les figures) qui comprend le relais de commande de montée RUV si l'étage de destination est plus haut que l'étage du parking, ou le relais de commande de descente LVL si l'étage de destination est en dessous du parking.
Après l'arrivée de la cabine à l'étage d'appel, l'ID du capteur inductif est ventilé, le relais RIS est éteint, ouvrant ses contacts, ce qui éteint le relais RUV ou RUN et la lampe LS (la cabine s'arrête), et en fermant le contact RIS4, un circuit est préparé pour l'exécution de l'ordre provenant de la voiture.
Dans le circuit collectif complet, le circuit divisé par les contacts RIS1 et RIS2 au sol du parking de la voiture est coupé non seulement par ces contacts, mais aussi par les contacts du relais de blocage haut RBV ou bas RBN (leurs bobines ne sont pas représentés sur le schéma), et les circuits d'élévation, d'abaissement et de commande sont séparés les uns des autres par des diodes de séparation D1 - D4.
Avant d'appuyer sur le bouton d'appel ou de commande, si le sens de marche du véhicule n'est pas encore sélectionné, tous les contacts du circuit de sélection de sens sont fermés, sauf les contacts RIS4 au niveau du parking.Ainsi, lorsque l'un de ces boutons est enfoncé, les signaux d'appel des étages situés au-dessus du sol du parking sont connectés à la bobine de relais RUN, et les signaux d'appel des étages inférieurs au parking incluent le relais RUV. Une fois la direction sélectionnée, simultanément avec le relais RUV ou LVL, l'un des relais de blocage de direction opposée RBV ou RBN s'allume, ce qui interrompt la sortie via le circuit de section des signaux d'appel non transitoires avec ses contacts.
Dans le schéma illustré à la fig. 2, a, pour abaisser les passagers, la cabine va sans s'arrêter à l'étage le plus élevé de la conversation, puis descend avec des arrêts de passage, et dans le schéma de la fig. 2, b, s'il est nécessaire de prendre des passagers, la cabine se rend à l'étage le plus bas de l'appel, puis monte avec des arrêts de passage.
Dans les schémas considérés, les sélecteurs sont réalisés sur des éléments relais. Parallèlement à cela, d'autres sélecteurs sont utilisés : came, photoélectrique, suivi de brosse continu, pas à pas, sur éléments statiques, etc.
Avec des flux de passagers importants, plusieurs ascenseurs sont installés dans un couloir, qui ont un contrôle combiné par paires ou par groupes pour augmenter le confort et améliorer la puissance. Le nombre d'ascenseurs connectés en groupes ne dépasse généralement pas quatre, mais le plus souvent trois, bien que l'on connaisse des systèmes qui contiennent jusqu'à huit ascenseurs dans un groupe.
Dans le contrôle de groupe, il existe généralement trois modes principaux de fonctionnement de l'ascenseur : montée maximale, descente maximale et mouvement équilibré dans les deux sens. L'activation des ascenseurs pour l'un ou l'autre mode est effectuée par le répartiteur ou automatiquement au moyen de l'horloge de programmation installée pour chaque groupe d'ascenseurs.
Dans les immeubles de grande hauteur, chaque groupe d'ascenseurs est fixé pour desservir une certaine zone d'étages, les autres étages n'en sont pas desservis. S'il y a plusieurs ascenseurs dans le groupe desservant une zone ou un immeuble de faible hauteur, afin d'augmenter la vitesse moyenne de déplacement en réduisant le nombre d'arrêts, des ascenseurs séparés peuvent être alloués pour desservir les étages pairs et impairs.
Pour effectuer une commande double ou groupée des ascenseurs, leurs circuits de commande doivent être collectifs et les appels à chaque étage dans les deux sens doivent être enregistrés séparément dans chaque sens par des dispositifs de stockage appropriés contenant des relais, des transistors, etc.
À titre d'exemple reflétant les spécificités de fonctionnement en commande jumelée d'ascenseurs avec des relais de stationnement supplémentaires du premier ascenseur 1PC et du deuxième ascenseur 2PC, considérons un fragment du schéma de principe illustré à la fig. 3.
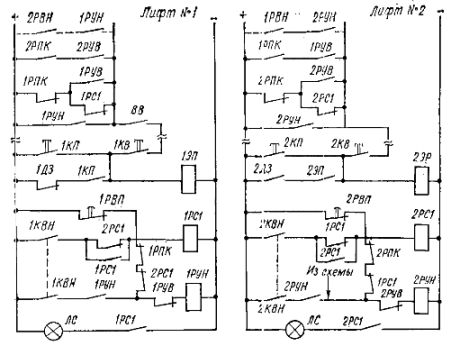
Riz. 3. Fragment d'un schéma de commande d'ascenseur jumelé : ER - relais d'étage, RPK - relais de commutation de canal, relais de démarrage automatique RVP
Dans ce cas, la voiture qui est descendue avec des passagers au premier étage ne répond pas aux appels des autres étages et attend des passagers. S'il n'y a pas de voiture au premier étage, alors la voiture qui est montée sur ordre et qui est libérée est automatiquement envoyée au premier étage, et lorsqu'une autre voiture est descendue ou garée, la dernière reste à l'étage à la fin du vol ou va au centre de chargement et est utilisé pour l'opération d'appel principalement dans la direction descendante.
Le relais de stationnement de la cabine du premier étage 1PC1 ou 2PC1 est activé après l'arrivée de la cabine du premier étage à partir de l'interrupteur de fin de course 1KVN ou 2KVN (installé dans les mines de copieurs). Ces relais sont bloqués.Par conséquent, l'inclusion de l'un d'eux indique que cette voiture est arrivée au premier étage plus tôt que l'autre. Dans ce cas, le relais 1PC1 ou 2PC1 avec son contact de fermeture allume le voyant LS et avec son contact d'ouverture coupe le circuit de sonnerie de son ascenseur, interrompant l'appel pendant que la voiture est garée au premier étage.
Lorsque la cabine quitte le premier étage, sa lampe de signalisation LS s'éteint, l'alimentation des circuits appelés de cet ascenseur est rétablie immédiatement après la libération de la cabine, et après que la cabine d'un autre ascenseur arrive au premier étage, son relais informatique est allumé. Cette cabine reste au rez-de-chaussée et attend les passagers (ce qui est signalé par l'allumage du voyant LS). Lorsque la cabine montée sur commande est libérée et qu'il n'y a pas d'appels, un signal est envoyé au circuit qui active les bobines de relais 1RUN ou 2RUV 1RUN ou 2RUV via les contacts d'ouverture de l'interrupteur de fin de course 1KVN ou 2KVN, et la cabine va au premier étage, et t .n.
L'équipement de commande de moteur des ascenseurs à commande simple, double et de groupe typiques est généralement situé sur des panneaux, des stations ou des unités de commande typiques installés dans les salles des machines.