Le principe de fonctionnement des détecteurs de proximité inductifs, les variétés et les exemples de leur utilisation
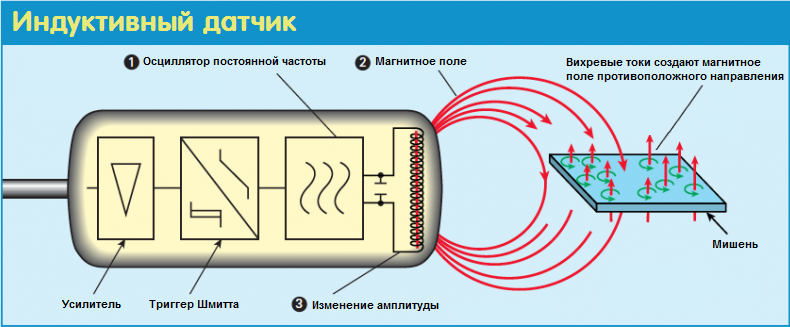
Les interrupteurs inductifs sans contact (capteurs de proximité) sont utilisés pour la détection automatisée sans contact d'objets à diverses fins industrielles. Le principe de leur fonctionnement repose sur le phénomène de modification de l'amplitude d'oscillation du générateur associé à l'introduction d'un objet ferromagnétique, magnétique ou métallique d'une certaine taille dans la zone de travail du capteur.
Lorsque le capteur est allumé, un champ magnétique alternatif agit dans sa zone de travail, et si maintenant du métal est introduit dans cette zone, alors les cibles sont dirigées vers ce métal courants de Foucault entraînera une modification de l'amplitude d'oscillation initiale du générateur, tandis que l'ampleur de la modification dépendra de la distance entre l'objet métallique et le capteur. La valeur correspondante du signal analogique sera convertie par la bascule en un signal logique, qui déterminera la valeur d'hystérésis et le niveau de commutation.

Le commutateur lui-même dans ce contexte est un convertisseur à semi-conducteur qui contrôle l'état d'un certain circuit de déclenchement externe en fonction de l'emplacement de l'objet observé, et la position de l'objet est déterminée sans contact mécanique avec le capteur.
Comme vous l'avez probablement déjà compris, l'élément sensible ici est inducteur, dont le circuit magnétique est ouvert en direction de la zone de travail.
Les interrupteurs de fin de course inductifs appartiennent à un grand groupe capteurs sans contact pour la position des mécanismes, qui sont très courants dans les systèmes automatiques modernes.
Le détecteur de proximité inductif d'un certain système d'automatisation agit comme l'outil principal de surveillance de la position de certains équipements, dont les signaux sont traités, en fonction de la destination de l'équipement, du compteur de produits, du contrôleur de mouvement, du système d'alarme, etc n. .
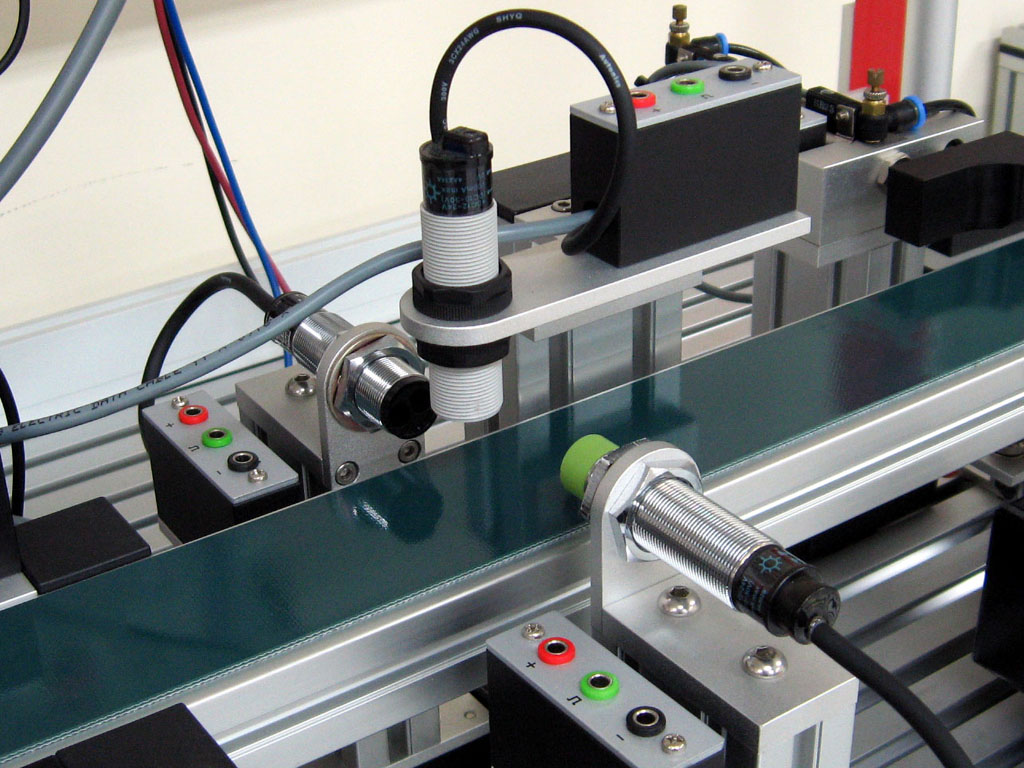
En particulier, les détecteurs de proximité inductifs sont souvent utilisés pour compter des objets métalliques et suivre leur position, par exemple, les bouteilles se déplacent le long d'un convoyeur, sur les bouchons duquel elles sont comptées, ou dans un atelier d'assemblage, un changement d'outil se produit après le compteur, la bride se trouve dans la plage d'un capteur inductif. …
Le processus de fonctionnement du commutateur peut être décrit comme suit. Dans l'état de fonctionnement, un champ magnétique d'une amplitude constante pulse devant la surface de travail du capteur sans contact.
Si le métal s'approche du capteur (par exemple, un bouchon en étain d'une bouteille ou une partie d'une pièce impliquée dans un assemblage robotique), alors il y aura une tendance à amortir les oscillations du champ magnétique, en conséquence, la valeur de la tension démodulée chute, le déclencheur est déclenché, ce qui conduit jusqu'à ce que l'élément de commutation soit commuté (par exemple jusqu'à ce qu'un compteur soit actionné ou jusqu'à ce que l'outil soit changé).
Tous les objets métalliques de taille suffisante, par exemple : saillies d'arbre, brides, plaques d'acier, têtes de boulons d'accouplement, etc., peuvent servir d'objets de contrôle ou de comptage pour les interrupteurs inductifs sans contact.

Selon le principe de commutation du circuit commandé et la méthode de connexion à celui-ci, les capteurs inductifs sont disponibles en plusieurs variétés, avec différents nombres de fils. Les capteurs sont construits sur la base de commutateurs NPN ou PNP, ils peuvent être normalement fermés ou normalement ouverts.
Deux fils - ils sont connectés directement au circuit de charge et sont alimentés par celui-ci, ici il est très important d'observer la polarité et la résistance de charge nominale, sinon le capteur ne fonctionnera pas correctement.
Les commutateurs à trois fils sont les plus courants, ils sont alimentés sur deux fils et le troisième est utilisé pour connecter la charge commutée.
Enfin, les interrupteurs à quatre fils ont la possibilité de sélectionner le mode de commutation (normalement fermé ou normalement ouvert).
Un autre type courant de capteurs de position dans les systèmes automatiques modernes : Détecteurs de proximité optiques