Capteurs sans contact pour la position des mécanismes
 Dans cet article, nous parlerons des capteurs de position des mécanismes. Fondamentalement, la fonction principale de tout capteur est de donner un signal lorsqu'un événement spécifique se produit. Autrement dit, lorsqu'un événement déclencheur se produit, le capteur est activé et génère un signal, qui peut être analogique ou discret, numérique.
Dans cet article, nous parlerons des capteurs de position des mécanismes. Fondamentalement, la fonction principale de tout capteur est de donner un signal lorsqu'un événement spécifique se produit. Autrement dit, lorsqu'un événement déclencheur se produit, le capteur est activé et génère un signal, qui peut être analogique ou discret, numérique.
Les capteurs de limite sont utilisés comme capteurs de position depuis de nombreuses décennies. commutateurs. Ils sont constitués de contacts électriques qui s'ouvrent ou se ferment mécaniquement lorsqu'une variable (position) atteint une certaine valeur. Les interrupteurs de fin de course de différents types constituent une partie importante de nombreux systèmes de contrôle, dont la fiabilité en dépend. de tels capteurs contiennent des éléments mécaniques mobiles dont les ressources sont limitées.
Les interrupteurs de fin de course sont actuellement activement remplacés par divers capteurs de proximité. Le plus souvent des capteurs de proximité des types suivants : inductif, générateur, magnétohercon et photoélectronique. Ces capteurs n'ont aucun contact mécanique avec l'objet mobile dont la position est surveillée.
Des capteurs de position sans contact assurent une vitesse et une fréquence élevées de mise en marche du mécanisme. Un certain inconvénient de ces capteurs est la dépendance, leur précision, des changements de tension d'alimentation et de température. Selon les besoins, le périphérique de sortie de ces appareils peut être le suivant élément logique sans contactet relais électrique.
Dans les schémas de freinage de précision des entraînements électriques, les capteurs de proximité peuvent être utilisés à la fois pour commander une rétrogradation et un arrêt final.
Il existe de nombreux types de capteurs sur le marché aujourd'hui, mais dans le cadre de cet article, nous mettrons en évidence le sujet des capteurs de position directement inductifs, car dans plus de 80% des cas, ce sont des capteurs inductifs qui servent de capteurs pour la position des mécanismes.
Le capteur inductif se déclenche lorsque le métal s'approche de sa zone de déclenchement. Pour cette raison, les capteurs de position inductifs sont également appelés capteurs de présence, capteurs de proximité ou simplement interrupteurs inductifs.
Considérons maintenant le principe de fonctionnement d'un capteur inductif. Comme mentionné ci-dessus, lorsque le métal est suffisamment proche de la zone de déclenchement, le capteur est activé. Ce phénomène consiste en l'interaction des parties impliquées inducteurs avec du métal qui s'en approche, ce qui modifie fortement l'amplitude du champ magnétique de la bobine, ce qui conduit à l'activation du capteur, il est déclenché, le signal correspondant apparaît à sa sortie.
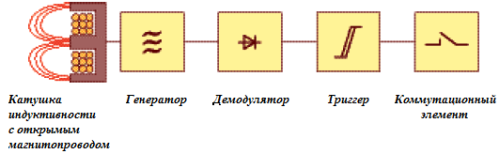
La partie électronique de l'appareil contient un circuit de commande, qui à son tour commande un relais ou un interrupteur à transistor. Il se compose des parties suivantes :
-
Un générateur qui crée un champ électromagnétique nécessaire pour interagir avec un objet.
-
Trigger de Schmitt fournissant une hystérésis de commutation.
-
Un amplificateur pour augmenter l'amplitude du signal afin qu'il atteigne la valeur d'actionnement requise.
-
Indicateur LED informant de l'état de l'interrupteur. Il assure également la surveillance et la configuration des performances.
-
Composé de protection contre la pénétration de particules solides et d'eau.
-
Boîtier pour le montage du capteur et la protection contre diverses influences mécaniques.Il est en laiton ou en polyamide et est fini avec des attaches.
Les capteurs de position inductifs sont largement utilisés dans les systèmes d'automatisation industrielle où il est nécessaire de déterminer périodiquement ou constamment la position de n'importe quelle partie du mécanisme. Le capteur génère un signal qui est envoyé au variateur. Un démarreur, un contrôleur, un relais, un convertisseur de fréquence, etc. peuvent agir comme un mécanisme exécutif. L'essentiel est que les paramètres du capteur correspondent aux paramètres du variateur en termes de tension et de courant.
La plupart des capteurs ne sont pas des dispositifs d'alimentation, ce sont principalement des dispositifs de signalisation, donc le capteur lui-même, en règle générale, ne commute rien de puissant, mais seulement contrôle, donne un signal de commande, agit comme un dispositif d'initiation d'action qui peut déjà être connecté à la commutation de puissance.
Les capteurs de position inductifs modernes se trouvent le plus souvent dans deux versions de boîtiers en plastique ou en métal : rectangulaire ou cylindrique. Le diamètre du capteur à section circulaire peut être de 4 à 30 mm, mais les diamètres les plus couramment utilisés sont 18 et 12 mm.
Lorsque le capteur est monté sur un équipement, un espace est défini entre la plaque métallique et la zone d'actionnement du capteur, généralement cette distance ne dépasse pas le diamètre du capteur et, en règle générale, elle s'avère 2 à 3 fois plus petite que son diamètre.
Selon la méthode de connexion, les capteurs de position inductifs peuvent être à deux fils, trois fils, quatre fils et cinq fils.
Deux fils commutent directement la charge, comme bobine de démarrage, c'est-à-dire qu'ils fonctionnent comme un interrupteur conventionnel. Les capteurs à deux fils nécessitent une résistance de charge, ils ne conviennent donc pas toujours comme outil fiable, mais ils ne perdent pas leur pertinence.
La charge est simplement connectée en série avec le capteur, si une tension constante est utilisée, il est important d'observer la polarité, si la polarité alternative n'est pas importante, l'essentiel est la puissance et le courant commutés.
Les capteurs à trois fils ont un troisième fil pour alimenter le capteur lui-même, et c'est la solution la plus populaire. Les capteurs à quatre et cinq fils ont des sorties transistor ou relais pour connecter la charge, et le cinquième fil vous permet de sélectionner le mode de fonctionnement du capteur, l'état initial des sorties.
Étant donné que les sorties peuvent être à la fois relais et transistor, les capteurs sont donc divisés en trois types selon le dispositif des sorties : relais, npn et pnp.
Capteurs avec sortie relais
Un capteur avec une sortie relais a une isolation galvanique du circuit d'alimentation du circuit inclus. Il commute un fil et la tension dans le circuit commuté n'est pas particulièrement critique. Etant donné que le circuit d'alimentation du capteur est isolé galvaniquement, cela peut être considéré comme un avantage du capteur à relais. Les capteurs de ce type sont généralement de grande taille.
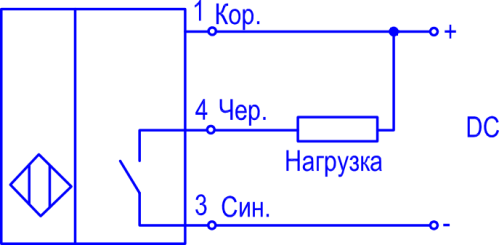
Capteurs avec sortie transistor pnp
Le capteur a un transistor pnp à la sortie qui commute le fil positif avec la charge. Une charge est connectée au circuit collecteur du transistor pnp de sortie, qui est connecté en permanence au négatif via son deuxième conducteur.
Capteurs avec sortie transistor npn
Le capteur a un transistor NPN à la sortie qui commute le fil négatif avec la charge. Une charge est connectée au circuit collecteur du transistor npn de sortie, qui est connecté en permanence par son deuxième conducteur au conducteur positif.
Selon l'état initial des sorties, les capteurs de position inductifs peuvent être des contacts normalement fermés ou normalement ouverts. L'état initial signifie que cet état est au moment où le capteur n'est pas encore déclenché, c'est-à-dire qu'il n'est pas activé.
Si les contacts de sortie sont normalement fermés, alors la charge est connectée au temps mort, si elle est normalement ouverte, jusqu'à ce que le capteur soit déclenché, la charge sera coupée et aucune alimentation ne sera fournie au variateur (par exemple, un contacteur). Les contacts normalement fermés sont désignés au format anglais — N.C. (Normalement fermé), Normalement ouvert — N.O. (Normalement ouvert).
Ainsi, les capteurs à sorties transistors sont de quatre types : deux types selon la conductivité (pnp ou npn) et deux types selon l'état initial des sorties. Il peut également y avoir un délai lors de l'activation ou de la désactivation.

Selon le type de lecteur connecté au capteur, ainsi que la méthode d'alimentation, la logique du capteur peut être positive ou négative. Cela est dû au niveau de tension qui active l'entrée de l'appareil.
Si l'entrée est activée lorsque le fil négatif de l'actionneur est relié à la masse, au moins, alors la logique est dite négative, une telle connexion est caractéristique des capteurs à sorties transistor de type npn.
La logique positive correspond à connecter le fil positif du variateur à l'alimentation positive lorsqu'il est activé, cette logique est typique des capteurs avec des sorties transistor pnp. Le plus souvent, il existe une logique positive au fonctionnement des capteurs inductifs de position des mécanismes.
Les anciens types de capteurs de position inductifs les plus couramment utilisés
Capteurs de position inductifs IKV-22
Capteurs inductifs IKV-22. Le fonctionnement de ces capteurs est basé sur le principe de la modification de la résistance inductive des bobines à noyau en acier lorsque l'entrefer dans le circuit magnétique change.
Un circuit magnétique à deux bobines est monté sur une plaque en acier, fermée par un couvercle en plastique. Deux condensateurs MBGP (l'un d'une capacité de 15 μF, 200 V, l'autre d'une capacité de 10 μF, 400 V) sont fixés à la plaque par le bas. Les condensateurs sont recouverts d'un couvercle. Le câble est connecté à travers le joint. Un shunt magnétique est installé sur le mécanisme dont les dimensions doivent être au minimum de : épaisseur 2 mm, largeur 80 mm, longueur 140 mm. L'entrefer entre le circuit magnétique et le shunt est de 6 ± 4 mm.
Le relais de sortie est généralement activé et désactivé au moment où le shunt magnétique traverse le capteur, lorsqu'en raison d'une modification de la résistance inductive de la bobine, une résonance de courant se produit et le courant à travers la bobine de relais chute. Ces relais : type MKU-48, 12 V AC, courant d'appel pas plus de 0,45 A, courant de chute pas moins de 0,1 A.La tension d'alimentation du circuit du capteur est de 24 V AC relais.
Capteurs de position inductifs ID-5
Dans les ateliers métallurgiques, on utilise des capteurs inductifs de type ID-5, conçus pour fonctionner à des températures ambiantes jusqu'à + 80 ° C et une humidité jusqu'à 100%. La poussière conductrice et le tartre sont acceptables. Un amplificateur de sortie à semi-conducteur de type UID-10 est utilisé avec le capteur. La puissance de sortie de l'amplificateur (25 W) est suffisante pour allumer les relais REV-800 répandus, les contacteurs KP21, MK-1, etc.
L'entrefer entre le capteur et l'objet ferromagnétique observé peut aller jusqu'à 30 mm. Les dimensions du capteur ID-5 sont de 187x170x70 mm, la tension d'alimentation est de 220 V ± 15%, 50 Hz.
Commutateurs sans contact BSP de petite taille
Les petits interrupteurs de mouvement BSP-2 (avec sortie sans contact, vers élément logique) et BRP (avec sortie vers relais PE-21, 24 V, 16 Ohm) sont utilisés sur les machines à couper les métaux.
Le commutateur BSP-2 se compose d'un capteur de transformateur différentiel et d'un déclencheur à semi-conducteur. Le système magnétique de la première bobine de capteur est déplacé par une plaque d'acier, et la seconde bobine est manipulée lorsqu'elle se déplace sur son système magnétique connecté au mécanisme d'armature plate. Les bobines sont allumées dans le sens opposé.
Si l'armature est au-dessus du capteur, les réactances inductives des bobines sont égales et la sortie du capteur du transformateur différentiel est nulle. Dans ce cas, une tension d'au moins 2,5 V apparaît à la sortie du déclencheur, ce qui est suffisant pour que l'élément logique fonctionne.
En l'absence d'armature au-dessus du capteur, une tension est appliquée au déclencheur, ce qui le ramène à son état d'origine. Alors le signal de sortie du commutateur est nul.
Le principe de fonctionnement du commutateur BRP est à bien des égards similaire à celui du BSP-2.Un capteur inductif (selon le circuit du transformateur différentiel), un déclencheur et un amplificateur sont installés à l'intérieur du boîtier. Les bobines secondaires avec un nombre de tours différent sont allumées dans le sens opposé. Lorsque l'armature chevauche le système magnétique du capteur, le signal diminue et après le changement de phase, le déclencheur est commuté et un relais de sortie externe (PE-21, 24 V, 16 Ohm) est activé.
L'ancre fixée au mécanisme a des dimensions de 80x15x3 mm. L'écart entre l'ancre et le capteur est de 4 mm. La précision des commutateurs en mode nominal est de ± 0,5 mm, le différentiel d'actionnement ne dépasse pas 5 mm. À. fluctuations de la tension d'alimentation et de la température, l'erreur des commutateurs BSP-2 et BRP peut atteindre ± (2,5-f-3,0) mm.
Capteurs inductifs haute fréquence VKB
Des capteurs inductifs de haute précision de type VKB avec une armature en forme de U ou plate sont également utilisés pour l'automatisation de machines de découpe de métaux. Les pôles du transformateur intégré forment un système électromagnétique ouvert. L'entrefer de travail est de 0,1 à 0,15 mm.
La tension de sortie de l'enroulement secondaire du transformateur est envoyée à un circuit de mesure différentiel puis à un amplificateur à transistor. L'erreur totale du capteur avec des fluctuations de température de 5 à 40 ° C et une tension de 85 à 110% de la valeur nominale est de ± (0,064-0,15) mm, la différence de réponse ne dépasse pas 0,4 mm. La vitesse de déplacement maximale du mécanisme est de 10 m/mm. Dimensions du capteur 62x34x24 mm. Tension d'alimentation 12 V.
Les types spéciaux de capteurs inductifs de précision pour les machines à couper les métaux avec un circuit différentiel ont une erreur inférieure à ± 0,01 mm.De tels capteurs comprennent un interrupteur de mouvement sans contact du type VPB12, constitué d'une unité de capteur sur une unité électronique. L'unité de capteur comprend un capteur de travail inductif, un capteur de compensation inductif et des cartes de circuits imprimés. Le mécanisme est monté : élément ferrite de commande. Tension d'alimentation 12 V CC. La distance d'exposition maximale ne dépasse pas 0,12 mm. Un relais de type RPU-0 peut être connecté à la sortie du capteur. Le courant de charge maximal du périphérique de sortie est de 0,16 A.
Capteurs de position du générateur
Les capteurs de ce type sont compacts et très précis. Les générateurs de capteurs des séries KVD-6M et KVD-25 (avec fentes), KVP-8 et KVP-16 (avion) ont fait leurs preuves. Ils conviennent à une utilisation dans des concentrations élevées d'humidité et de poussière. Les éléments du circuit transistor du capteur (générateur et déclencheur) sont situés dans un boîtier en polystyrène résistant aux chocs. Le scellement est effectué avec un composé durcissant à froid. La plage de température de fonctionnement est de — 30 à +50 ° C.
Le capteur HPC génère un signal discret lorsqu'une plaque métallique («drapeau») traverse la fente, provoquant une panne dans la génération et la commutation du déclencheur. La largeur de la fente est de 6 mm pour le capteur KVD-6M et de 25 mm pour le capteur KVD-25.
Les capteurs KVP-8 et KVP-16 sont activés lorsqu'une plaque métallique passe à côté d'eux à une distance maximale de 8 et 16 mm, respectivement.