Piston contrôle du mouvement des mécanismes
Circuits de relais
 En figue. 1 montre diverses variantes de schémas de commande de mouvement de piston à course constante fixés par le contrôleur SQ.
En figue. 1 montre diverses variantes de schémas de commande de mouvement de piston à course constante fixés par le contrôleur SQ.
Les schémas de la fig. 1, a-c est utilisé lorsque le cycle consiste en un mouvement « avant » B et un mouvement « arrière » H jusqu'à la position de départ. Les schémas 1, a et b sont utilisés avec une commande automatique donnée par le relais KQ. Le relais KT fournit une pause avant de commencer la marche arrière. Dans le schéma de la fig. 1, l'ordre de démarrage du cycle est donné par le contrôleur ou interrupteur universel SM.
Pour mettre en œuvre un mouvement alternatif infini, le schéma de la fig. 1, d. Si le nombre de coups doit être limité par une valeur n donnée, un contact ouvert d'un relais de comptage ou d'un ensemble de plusieurs relais, qui compte les impulsions fournies par le contact de fermeture du contacteur "arrière" KM2, est inclus dans le circuit du contacteur « avant » KM1.
Un exemple de mise en œuvre d'un mouvement alternatif avec une longueur de course variable dans quatre positions est illustré à la fig. 2.Les contacts SQ.1- SQ.4- du dispositif de commande SQ sont utilisés pour désactiver alternativement le mécanisme dans les positions 1 à 4 de la course "avant", le contact SQ.5- dans la position initiale. Le circuit utilise des commandes impulsionnelles données par le relais d'automatisation KQ1, qui est fermé, par exemple, lors de l'alimentation de la pièce, et KQ2, qui fixe la fin de l'opération intermédiaire à la fin de chaque course.
La manœuvre séquentielle SQ.1 — SQ.3 du contrôleur SQ est effectuée par les contacts du relais pour compter le nombre de mouvements du mécanisme "arrière" KS1, KSZ et KS5. Le relais KS7, fixant le quatrième mouvement "en arrière", éteint le relais KS1-KC6 et interdit la prochaine commutation sur "en avant" jusqu'à ce que le bleu arrive à la fin de l'opération technologique avec ce groupe de blancs (relais KR). Le contact d'ouverture du relais KR dans le circuit de la bobine KC7 ramène le circuit à son état d'origine.
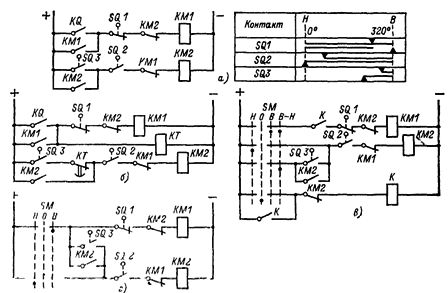
Riz. 1. Circuits de commande de relais pour mouvement alternatif
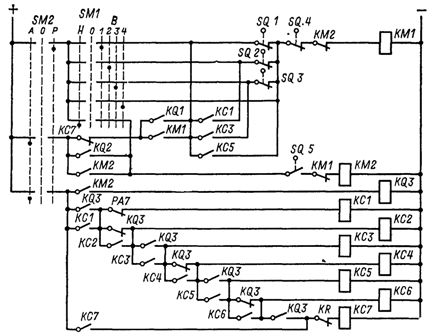
Figure 2. Schéma de commande du relais alternatif à longueur de course variable
Circuit logique
Le circuit de contrôle du mouvement du piston réalisé sur les éléments de la série «Logic T» est illustré à la fig. 3. Les éléments D1-D3 de type T-201 sont utilisés pour coordonner les signaux du relais d'entrée avec les éléments logiques.
La mémoire des éléments D4.1, D4.2 fixe la présence d'une commande d'avancer "avant" lorsque le relais KQ est enclenché pulsé. Grâce à l'amplificateur D5, le contacteur avant KM1 est activé. A la fin du mouvement du mécanisme "avant", lorsque le contact du contrôleur SQ 1 est fermé, un signal 1 apparaît à la sortie de l'élément correspondant D2, qui éteint la mémoire D4 et le contacteur KM1 et allume la mémoire sur les éléments D6. Dans ce cas, la commande de déplacement "en arrière" est donnée et mémorisée.Cette commande est supprimée et le recul est arrêté lorsque le contact du contrôleur SQ 2 se ferme en position initiale, lorsque le signal 1 apparaît à la sortie de l'élément D3 correspondant, désactivant la mémoire D6.
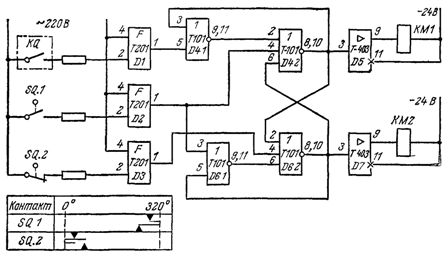
Riz. 3. Schéma de contrôle du mouvement alternatif sur les éléments de la série «Logic T»
Les mémoires D4 et D6 sont bloquées, donc une seule d'entre elles peut être activée. Lorsque la mémoire D4 est allumée, le signal 1 de la sortie de l'élément D4.2 est envoyé à l'entrée 2 de l'élément D6.2, désactivant la mémoire D6 et vice versa. Lorsque la mémoire D6 est activée, le signal 1 de la sortie de l'élément D6 2 est envoyé à l'entrée 6 de l'élément D4.2, désactivant la mémoire D4.