Circuits de commande de contacteur et de protection moteur
 Selon la fonction à réaliser, il existe différents circuits de commande du moteur du contacteur.
Selon la fonction à réaliser, il existe différents circuits de commande du moteur du contacteur.
La figure 1a montre un schéma combiné d'un démarreur magnétique irréversible... Dans celui-ci, la disposition des éléments coïncide avec la disposition dans la nature, c'est-à-dire que tous les éléments situés dans la boîte de démarrage sont regroupés sur le côté gauche du schéma, et station de boutons-poussoirs avec boutons « Démarrer » et « Arrêter » indiqué sur le côté droit du schéma.
La station de boutons est généralement située à une certaine distance du démarreur magnétique… Pour comprendre le principe de fonctionnement du circuit de commande du moteur, des schémas détaillés (de base) sont généralement utilisés (Fig. 1.b). En appuyant sur le bouton de démarrage SB2, le circuit de la bobine du contacteur KM est fermé, qui comprend trois contacts KM du circuit d'alimentation du moteur. Dans ce cas, le contact de bloc KM connecté en parallèle avec le bouton de démarrage SB2 se ferme également. Cela vous permet d'activer la bobine KM lorsque le bouton SB2 est relâché.
Le moteur est arrêté en appuyant sur le bouton SB1 tandis que la bobine s'éteint et libère les contacts de puissance (principal) et le contact auxiliaire. Lorsque le bouton SB1 est relâché, le circuit de la bobine KM sera désexcité. Pour redémarrer le moteur, appuyez à nouveau sur le bouton SB2.
Ce circuit fournit également la soi-disant protection zéro, c'est-à-dire que si la tension secteur disparaît ou tombe à 50-60% de la valeur nominale, la bobine KM ne maintiendra pas les contacts d'alimentation KM et le moteur sera éteint. Lorsqu'une tension apparaît ou augmente jusqu'à une valeur proche de la valeur nominale, le démarreur magnétique ne s'enclenche pas spontanément. Pour l'allumer, vous devez appuyer à nouveau sur le bouton de démarrage.
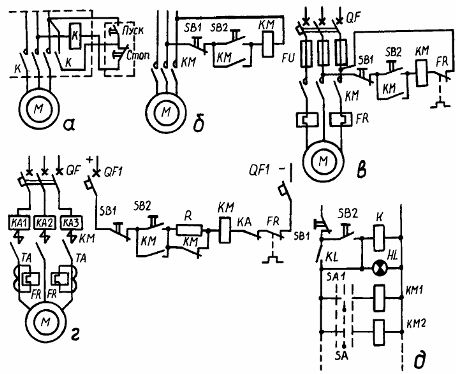
Riz. 1. Schémas de commande et de protection du moteur : a — schéma combiné et b — schéma détaillé d'un démarreur magnétique irréversible ; c — protection du moteur au moyen de fusibles et de relais thermiques ; d — schéma du puissant poste de commande du moteur ; d — zéro protection d'un relais intermédiaire
La protection du moteur contre la surchauffe de l'enroulement est réalisée lors de surcharges prolongées relais thermiques FR, et la protection contre les surcharges importantes ou les courts-circuits est assurée par des fusibles FU ou disjoncteurs QF (Fig. 1, c). Pour se protéger contre les surcharges prolongées, deux relais thermiques sont utilisés, car avec un relais, en cas de fusible grillé, en série avec lequel l'élément chauffant de ce relais est connecté, le moteur sera connecté à un réseau monophasé et ils ne seront pas protégés. Les contacts de coupure de ces relais sont connectés en série avec la bobine de démarrage. Lorsque l'un d'eux s'ouvre, la bobine KM est désexcitée et le moteur s'arrête, comme lors de l'appui sur le bouton SB1.
Une station de commande de moteur à haute puissance est illustrée à la fig. 1, d La protection contre les courts-circuits est assurée par le relais de surcharge KA1 - KA3, la protection contre les surcharges est assurée par des relais thermiques FR connectés via des transformateurs de courant. La bobine d'un contacteur tripolaire est alimentée en courant continu. Pour réduire le courant dans la bobine du contacteur après son inclusion dans le circuit, une résistance supplémentaire R est introduite, qui était auparavant court-circuitée par le contact ouvert KM.
Dans les circuits de commande manuelle avec plusieurs contrôleurs, commutateurs ou autres dispositifs, des relais intermédiaires sont utilisés pour assurer la protection du neutre. (Fig.1, e) Pour appliquer une tension au circuit de commande, appuyez sur le bouton SB2, activant ainsi le relais intermédiaire K, qui comprend son contact de fermeture K et le voyant HL, indiquant la présence de tension dans le circuit de commande . Après avoir relâché le bouton SB2, la bobine de relais sera bloquée tandis que les circuits du contrôleur SM1, du commutateur de paquets SM, etc. et les bobines des contacteurs KM1, KM2, etc., seront excitées.
Dans les schémas considérés, les contacts autobloquants sont nécessaires au fonctionnement continu des moteurs. Souvent, dans la pratique, le moteur n'a besoin de tourner que lorsque le bouton de démarrage est enfoncé, par exemple dans les machines de levage. Dans ce cas, il n'y a pas de bouton d'arrêt dans le circuit de commande (Fig. 2, a). Parfois, il est nécessaire d'assurer le fonctionnement du lecteur en deux modes, c'est-à-dire de l'allumer pendant une courte période lors de la configuration de la machine ou pendant une longue période. Ensuite, avec une courte pression sur le bouton SB2 (Fig. 2.b), la bobine du contacteur KM s'allumera et le contact autobloquant du KM se fermera, tandis que le moteur fonctionnera lorsque le bouton SB2 sera relâché .
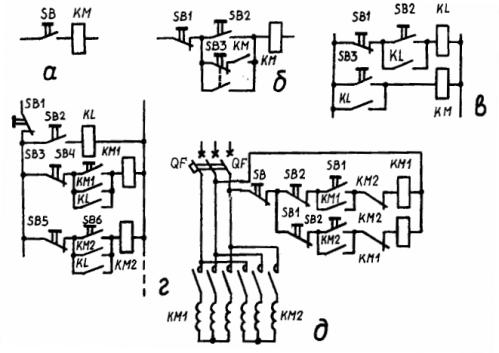
Riz. 2. Types de circuits de commande pour moteurs asynchrones : a — en mode pas à pas ; b et c — pendant le travail prolongé et le jogging ; d — inclusion simultanée de plusieurs moteurs ; d - démarrage en continu d'un moteur à deux vitesses
Pour le mode commande moteur, appuyez sur le bouton SB3, son contact de fermeture active la bobine du contacteur KM, et le contact d'ouverture coupe le circuit autobloquant du contacteur. L'inconvénient de ce circuit est que le contact ouvert du bouton SB3 peut se fermer avant que le contact du bloc KM ne s'ouvre et le moteur ne s'éteint pas. Le circuit représenté sur la fig. 2, f, est dépourvu de ce défaut.
Pour un fonctionnement continu, une pression sur le bouton SB2 active le relais intermédiaire K. L'un des contacts K active la bobine du contacteur KM et l'autre bloque simultanément le bouton SB2, éteignant ainsi le fonctionnement du moteur avec le bouton de démarrage libéré. Pour démarrer l'opération, appuyez sur le bouton SB3 et maintenez-le enfoncé pendant le temps requis.
La figure 2d montre un schéma de démarrage de plusieurs moteurs en même temps à partir d'un bouton de démarrage à l'aide d'un relais intermédiaire ... Le bouton SB2 active le relais K, dont les contacts de fermeture activent simultanément les bobines des contacteurs KM1, KM2, etc. Arrêtez tous les moteurs simultanément avec le bouton SB1. Pour allumer et éteindre chaque moteur individuellement, utilisez les boutons SB3, SB4 et SB5, SB6, etc. respectivement.
Un schéma de démarrage en continu d'un moteur à rotor à cage d'écureuil à deux enroulements et à deux vitesses illustré à la Fig. 2, e. Pour démarrer le moteur à la première vitesse, le bouton SB1 est utilisé, à la seconde - SB2.Les deux boutons sont mécaniquement verrouillés pour empêcher le moteur d'engager deux vitesses en même temps.
Les circuits de démarrage sont également bloqués électriquement. Ainsi, lorsque, par exemple, la bobine KM1 est actionnée, le contact d'ouverture coupe le circuit de la bobine KM2, excluant la possibilité de son inclusion. Pour passer à la deuxième vitesse, vous devez appuyer sur le bouton SB2, tandis que le circuit de la bobine KM1 est interrompu et qu'il s'éteint. La bobine du circuit KM2 est alimentée et allume le moteur à la deuxième vitesse.
La commande inverse des moteurs asynchrones est effectuée à l'aide de deux contacteurs (Fig. 3, a).
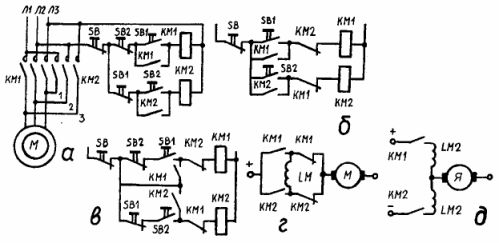
Figue. 3. Schémas de commande du moteur : a — démarreur magnétique réversible avec blocage mécanique ; b — pareil avec le blocage électrique; c — une combinaison des options a et b ; d et e - démarrage et inversion des moteurs à courant continu de faible puissance
Le contacteur KM1 est utilisé pour engager le moteur en marche avant et KM2 est utilisé en marche arrière. Pour éviter l'activation simultanée accidentelle des deux contacteurs, ce qui entraîne un court-circuit, le circuit utilise (voir Fig.3, a) un blocage mécanique mutuel avec deux contacts d'interruption des boutons SB1 et SB2. En appuyant sur le bouton SB1, allumez le circuit de la bobine KM1 et déconnectez le circuit de la bobine KM2.
Lorsque les boutons SB1 et SB2 sont enfoncés simultanément, les circuits des bobines KM1 et KM2 sont interrompus et aucun des contacteurs ne s'enclenche. Le blocage est effectué par deux contacts d'interruption KM2 et KM1, inclus dans les circuits des bobines KM1 et KM2, respectivement (Fig.3, b). Pour inverser le moteur dans ce schéma, vous devez d'abord appuyer sur le bouton SB.
Le circuit de la fig. 3, c est une combinaison des deux circuits précédents, c'est-à-dire qu'il y a double blocage.Le bouton SBI ferme le contacteur KM1, et le circuit de la bobine du contacteur KM2 est interrompu par le contact simultanément ouvert du bouton SB1 et le contact du bloc KM1.
La figure 3, d et e montre les schémas les plus simples de démarrage et d'inversion de moteurs à excitation séquentielle de faible puissance ... De tels moteurs sont connectés au réseau sans rhéostats de démarrage. Selon le schéma de la fig. 3, d, le démarrage et l'inversion du moteur à excitation série s'effectuent au moyen de deux relais intermédiaires. Le moteur est inversé en inversant le sens du courant dans la bobine de champ LM. Dans les moteurs à deux enroulements de champ en série créant des flux magnétiques dans des directions opposées, le circuit de commutation et d'inversion n'a que deux contacts de contact (voir Fig. 3, e).
Comme le montrent les schémas de contrôle considérés, il est plus facile d'automatiser le processus de démarrage et d'inversion des moteurs asynchrones à rotor à cage d'écureuil. Dans ce cas, tout contrôle au démarrage est réduit à la connexion du moteur au réseau électrique et à l'arrêt - à la déconnexion du réseau.
Plus complexe est l'automatisation du démarrage, de l'arrêt et de l'arrêt des moteurs à induction avec un enroulement de phase du rotor, des moteurs à induction à cage d'écureuil de puissance accrue, des moteurs à courant continu de puissance moyenne et élevée, des moteurs à induction à plusieurs vitesses avec démarrage par étapes, ainsi comme moteurs synchrones. Ces moteurs sont contrôlés en fonction du temps, vitesse et actuel.
En plus des cas ci-dessus, le contrôle du moteur peut être effectué et selon le principe du chemin, lorsque le moteur démarre et ralentit lorsque le corps de travail atteint une certaine position dans l'espace.Les systèmes exécutant de telles fonctions sont appelés systèmes en boucle ouverte car ils n'ont pas de rétroaction entre la valeur de sortie et la valeur d'entrée.