Circuits de blocage et de signalisation automatiques
 Dans les entraînements multimoteurs, une séquence définie de mise en marche, d'arrêt, d'inversion, de régulation et d'arrêt de différents moteurs est généralement fournie au moyen de connexions de verrouillage entre les circuits de commande des moteurs électriques individuels.
Dans les entraînements multimoteurs, une séquence définie de mise en marche, d'arrêt, d'inversion, de régulation et d'arrêt de différents moteurs est généralement fournie au moyen de connexions de verrouillage entre les circuits de commande des moteurs électriques individuels.
Voici quelques schémas de verrouillage automatique utilisés pour contrôler deux moteurs à rotor à cage d'écureuil.
Selon le schéma de la fig. 1, a, le démarrage d'un moteur exclut la possibilité d'enclencher l'autre, qui est assurée par les contacts auxiliaires K1 et K2, qui s'ouvrent lorsque le contacteur de l'autre moteur est actionné. Le même circuit peut être utilisé pour contrôler à distance chaque moteur individuellement sans blocage. Pour ce faire, le commutateur à deux positions SM doit être réglé sur la bonne position lorsque les deux paires de contacts 1 et 2 sont fermées, en contournant les contacts auxiliaires K1 et K2.
Selon le schéma de la fig. 1, b, le premier moteur (non représenté sur la figure) est allumé en appuyant sur le bouton de démarrage SB1. Parallèlement, le deuxième moteur s'allume automatiquement. Mais le deuxième moteur ne peut pas démarrer lorsque le premier ne fonctionne pas.La mise en marche de l'un des moteurs entraîne l'arrêt immédiat de l'autre moteur. En fonctionnement automatique, le commutateur SM est réglé sur la position gauche, où les contacts 1 et 3 sont fermés, et en commande séparée, le commutateur est réglé sur la position droite, lorsque les contacts 2 et 4 sont fermés.
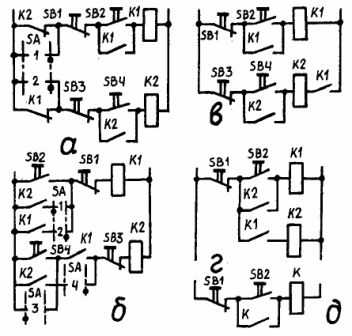
Figue. 1. Schémas de blocage de deux moteurs asynchrones : a — exceptions de blocage ; b et c — blocage dépendant; conducteur - lorsque deux moteurs fonctionnent ensemble
Selon le schéma de la fig. 1, les moteurs sont mis en marche un par un : d'abord le premier moteur avec le bouton SB1, puis le deuxième moteur avec le bouton SB2. Il est possible que le premier moteur fonctionne séparément, mais le deuxième moteur ne peut fonctionner qu'avec le premier. Le schéma de commande de démarrage est grandement simplifié si les moteurs ne doivent fonctionner qu'ensemble.
Selon le schéma de la fig. 1, d, ceci est fourni par deux contacteurs et un bouton de démarrage commun, et dans le schéma de la fig. 1, d - d'un contacteur commun. Dans tous les schémas ci-dessus, les moteurs sont arrêtés à l'aide des boutons SB correspondants.
Quelle que soit la rationalité de la composition du schéma de commande du moteur, la possibilité de dysfonctionnements dans le fonctionnement de ses éléments individuels doit être prise en compte. La fiabilité de fonctionnement dépend non seulement de la qualité de l'équipement et de son installation, mais également de la construction du circuit de contrôle, il est donc nécessaire de prévoir différents types d'alarmes pour les modes de fonctionnement du circuit et d'éviter les modes d'urgence. Afin d'exclure la poursuite spontanée des travaux après rétablissement de la tension sans reconnexion du circuit, l'opérateur fournit une signalisation d'information (Fig. 2). Malgré la simplicité de la version de la Fig.2, ah, cela peut donner une fausse alarme lorsque la lampe s'éteint.
Une option plus fiable est la Fig. 2, b, car si l'une des deux lampes grille, elle ne donnera pas de fausses informations. Si le circuit a des contacts libres, alors la variante de la fig. 2, avec est plus fiable. Le signal de rétablissement de tension en présence du relais de tension KV peut être donné selon le schéma de la fig. 2, d. Après la coupure de la tension, le redémarrage est effectué par le bouton de déclenchement SB. Un circuit ouvert des bobines de relais ou de contacteur ne doit pas être la cause d'un fonctionnement incorrect. Par conséquent, les contacts normalement ouverts qui se ferment lorsque le circuit de la bobine est ouvert ne doivent pas être inclus dans les circuits de commande.
Dans le circuit de la fig. 2, e un relais de surveillance de vaisseau spatial du courant dans les enroulements des unités critiques est utilisé, qui est connecté en parallèle avec la bobine du contacteur K. Le signal ouvert dans la bobine K est indiqué par la lampe HL. Si l'armature du contacteur K colle lors de la coupure de tension, le signal que le contacteur reste passant est fourni par l'allumage de la lampe HL1.
Une variante du circuit d'alarme sonore est illustrée à la fig. 2, e Ce schéma est utilisé pour surveiller le bon fonctionnement de quatre moteurs. Une fois les quatre moteurs démarrés, l'alarme de ce circuit est automatiquement préparée pour l'activation. Dans ce cas, le contact de fermeture du quatrième moteur K4 active le relais de préparation du signal sonore KV, et les contacts d'ouverture de la section ab s'ouvrent. Dans ce cas, les contacts d'auto-verrouillage et de blocage du relais KV sont fermés.
En cas de surcharge, par exemple, d'un des moteurs de la section ab, un des contacts d'ouverture se fermera et l'alarme HA se déclenchera immédiatement. Pour supprimer le buzzer, appuyez sur le bouton SB connecté en série avec HA, ouvrant ainsi le circuit du relais KV et ses contacts KV. En appuyant sur le bouton SB1, les moteurs sont automatiquement arrêtés et le relais d'arrêt automatique KH est activé.
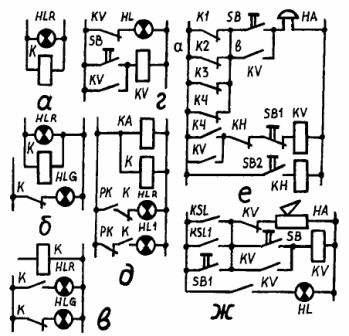
Riz. 2. Schémas de signalisation : a, b, c — exemples de signalisation d'informations ; d et d — avec relais de tension et de contrôle ; f, g — urgence
Le relais KH à contact ouvert coupera le circuit d'alimentation des bobines des contacteurs K1 K2, K3 et K4 (contacteurs non représentés sur le schéma) et avec l'autre contact KN coupera le relais KV qui éteindra le buzzer HA. Pour vérifier le bip, appuyez sur le bouton SB.
Afin de contrôler les niveaux supérieur et inférieur de sciure dans la trémie de fabrication de panneaux de particules, une alarme sonore peut être utilisée, illustrée à la Fig. 2, g. Lorsque les copeaux atteignent le niveau supérieur de la trémie, le relais KSL s'allumera et son contact de fermeture allumera le bipeur HA. Lorsque les copeaux dans la trémie tombent en dessous du niveau défini, le contact du relais de niveau bas RSL1 se ferme et émet un signal sonore.
En appuyant sur le bouton SB, le bip est supprimé. Le bouton SB activera le relais pour supprimer le signal KV, et son contact ouvert désactivera la signalisation HA. Le relais KV restera alimenté par un contact à verrouillage automatique jusqu'à ce que la tension de commande soit supprimée. En appuyant sur le bouton SB1, le fonctionnement de l'alarme sonore est vérifié.
En figue.La figure 3 montre un schéma de signalisation électrique de deux paramètres de processus.
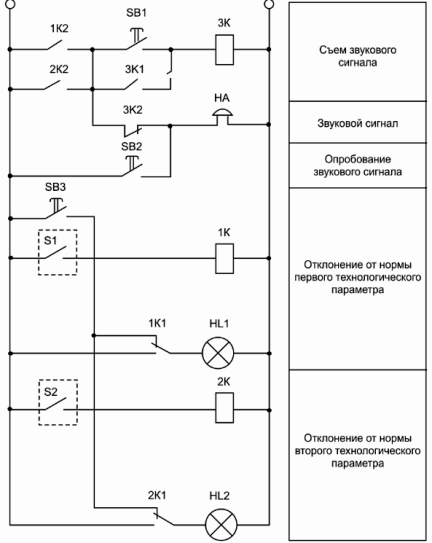
Riz. 3. Circuit d'alarme
En cas d'écart par rapport à la norme de l'un d'entre eux, par exemple le premier, le contact de processus S1, situé dans l'appareil de mesure ou de signalisation correspondant, se ferme. Cela inclut le relais 1K qui, avec son contact de commutation 1K1, allume le voyant HL1 et l'éteint à partir du bouton de test d'alarme SB3.
En même temps, le contact de fermeture 1K2 du relais 1K via le contact d'ouverture 3K2 du relais déconnecté 3K active la sonnerie. La sonnerie est activée par le bouton de déclenchement de l'alarme sonore SB1, lorsqu'il est enfoncé, le relais 3K à travers son contact de contact 3X7 est auto-maintenu, la sonnerie est déconnectée du contact ouvert.
Si dans cet état du circuit, le deuxième contact de processus S2 se ferme, alors lorsque le buzzer est retiré, seul le voyant HL2 s'allume et le buzzer ne retentit pas. Le circuit reviendra à son état d'origine après l'ouverture des deux contacts de processus S1 et S2, provoquant la désactivation de tous les relais. Les boutons SB2 et SB3 sont destinés au test de la sonnerie et des lampes de signalisation.