Circuits de commande automatique pour le démarrage et l'arrêt des moteurs à courant continu
 Le démarrage de tout moteur s'accompagne de certains interrupteurs dans le circuit de puissance et le circuit de commande. Dans ce cas, des relais-contacteurs et des dispositifs sans contact sont utilisés. Pour les moteurs à courant continu à limiter courants de démarrage des résistances de démarrage sont incluses dans le rotor et le circuit d'induit des moteurs, qui sont désactivés lorsque les moteurs sont accélérés par étapes. Lorsque le démarrage est terminé, les résistances de démarrage sont complètement contournées.
Le démarrage de tout moteur s'accompagne de certains interrupteurs dans le circuit de puissance et le circuit de commande. Dans ce cas, des relais-contacteurs et des dispositifs sans contact sont utilisés. Pour les moteurs à courant continu à limiter courants de démarrage des résistances de démarrage sont incluses dans le rotor et le circuit d'induit des moteurs, qui sont désactivés lorsque les moteurs sont accélérés par étapes. Lorsque le démarrage est terminé, les résistances de démarrage sont complètement contournées.
Le processus de freinage des moteurs peut également être automatisé. Après la commande d'arrêt, à l'aide de l'équipement relais-contacteur, les interrupteurs nécessaires sont effectués dans les circuits de puissance. A l'approche d'une vitesse proche de zéro, le moteur est déconnecté du réseau. Lors du démarrage, les étapes sont désactivées à intervalles réguliers ou en fonction d'autres paramètres. Cela modifie le courant et la vitesse du moteur.
La commande de démarrage du moteur est effectuée en fonction de la FEM (ou de la vitesse), du courant, du temps et du chemin.
Sous-ensembles et circuits typiques pour le contrôle automatique du démarrage des moteurs à courant continu
Le démarrage d'un moteur à courant continu à excitation parallèle ou indépendante se fait avec une résistance introduite dans le circuit d'induit. Une résistance est nécessaire pour limiter le courant d'appel. Lorsque le moteur accélère, la résistance de démarrage est étagée. Une fois le démarrage terminé, la résistance sera complètement contournée et le moteur retrouvera ses caractéristiques mécaniques naturelles (Fig. 1). Au démarrage, le moteur accélère selon la caractéristique artificielle 1, puis 2, et après manœuvre de la résistance - selon la caractéristique naturelle 3.
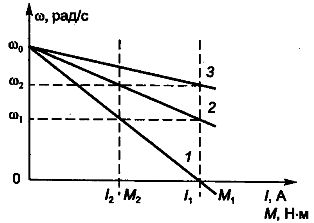
Riz. 1. Caractéristiques mécaniques et électromécaniques d'un moteur à courant continu à excitation parallèle (ω — vitesse angulaire de rotation ; I1 M1 — courant de crête et couple du moteur ; I2 M2 — courant et moment de commutation)
Considérez le nœud du circuit de démarrage du moteur à courant continu (DCM) dans la fonction EMF (Fig. 2).
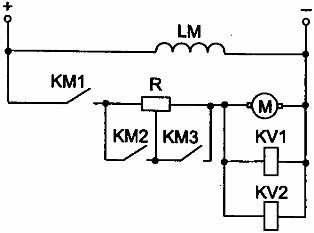
Riz. 2. Le nœud du circuit de démarrage du DCT d'excitation parallèle dans la fonction EMF
La fonction EMF (ou vitesse) est contrôlée par des relais, des tensions et des contacteurs. Les relais de tension sont configurés pour fonctionner à différentes valeurs emf d'induit. Lorsque le contacteur KM1 est activé, la tension du relais KV au moment du démarrage n'est pas suffisante pour le fonctionnement. Lorsque le moteur accélère (en raison de l'augmentation de la fem du moteur), le relais KV1 est activé, puis KV2 (les tensions d'activation du relais ont des valeurs correspondantes) ; ils comprennent les contacteurs d'accélération KM2, KMZ et les résistances du circuit d'induit sont shuntées (les circuits de commutation des contacteurs ne sont pas représentés sur le schéma; LM est l'enroulement d'excitation).
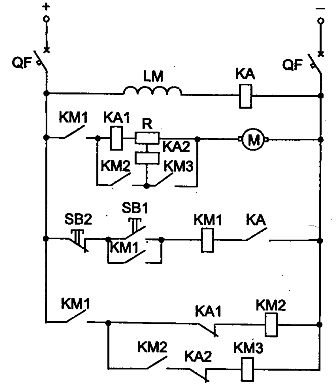
Regardons le schéma de démarrage d'un moteur à courant continu dans la fonction EMF (Fig. 3). La vitesse angulaire du moteur est souvent fixée indirectement, c'est-à-diremesurer des grandeurs liées à la vitesse. Pour un moteur à courant continu, une telle valeur est la FEM. Le démarrage s'effectue comme suit. Le disjoncteur QF s'enclenche, le champ moteur est connecté à l'alimentation. Le relais KA s'active et ferme son contact.
Les appareils restants du circuit restent dans leur position d'origine. Pour démarrer le moteur, vous devez appuie sur le bouton SB1 «Start», après quoi le contacteur KM1 est activé et connecte le moteur à la source d'alimentation. Le contacteur KM1 est auto-alimenté Le moteur à courant continu est accéléré avec la résistance du circuit d'induit du moteur R.
Lorsque la vitesse du moteur augmente, sa fem et la tension dans les bobines des relais KV1 et KV2 augmentent. A la vitesse ω1 (voir Fig. 1.) le relais KV1 est activé. Il ferme son contact dans le circuit contacteur KM2, qui déclenche et court-circuite le premier étage de la résistance de démarrage avec son contact. A la vitesse ω2 le relais KV2 est excité. Avec son contact, il ferme le circuit d'alimentation du contacteur KMZ qui, lorsqu'il est actionné, avec un contact, court-circuite le deuxième étage de démarrage de la résistance de démarrage. Le moteur atteint ses caractéristiques mécaniques naturelles et termine le décollage.
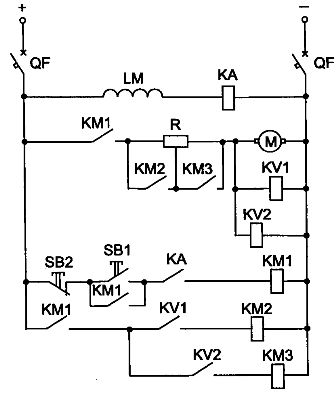
Riz. 3. Schéma de démarrage DCT d'excitation parallèle dans la fonction EMF
Pour le bon fonctionnement du circuit, il est nécessaire de régler le relais de tension KV1 pour fonctionner à la FEM correspondant à la vitesse ω1 et le relais KV2 pour fonctionner à la vitesse ω2.
Pour arrêter le moteur, appuyez sur le bouton Stop SB2. Pour déconnecter le circuit électrique, ouvrez le disjoncteur QF.
La fonction de courant est commandée par un relais de courant. Considérez le nœud du circuit du démarreur de moteur à courant continu dans la fonction de flux. Dans le diagramme montré à la fig.4, des relais de surintensité sont utilisés, qui s'activent au courant d'appel I1 et retombent au courant minimum I2 (voir Fig. 1). Le temps de réponse interne des relais de courant doit être inférieur au temps de réponse des contacteurs.
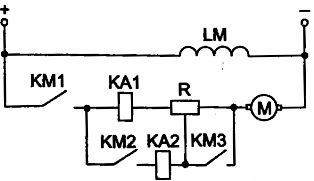
Riz. 4. Le nœud du circuit de démarrage du DCT d'excitation parallèle en fonction du courant
L'accélération du moteur commence avec la résistance complètement insérée dans le circuit d'induit. Lorsque le moteur accélère, le courant diminue, avec le courant I2, le relais KA1 disparaît et avec son contact ferme le circuit d'alimentation du contacteur KM2, qui contourne le premier contact de la résistance de démarrage avec son contact. De même, le deuxième étage de démarrage de la résistance est court-circuité (relais KA2, contacteur KMZ). Les circuits de puissance des contacteurs ne sont pas représentés sur le schéma. À la fin du démarrage du moteur, la résistance du circuit d'induit sera pontée.
Considérez le circuit de démarrage d'un moteur à courant continu comme une fonction de flux (Fig. 5). Les résistances des marches de résistance sont choisies de sorte qu'au moment où le moteur est mis en marche et les marches sont shuntées, le courant I1 dans le circuit d'induit et le moment M1 ne dépassent pas le niveau autorisé.
Démarrage d'un moteur à courant continu s'effectue en allumant le disjoncteur QF et en appuyant sur le bouton « Start » SB1. Dans ce cas, le contacteur KM1 est activé et ferme ses contacts. Le courant d'appel I1 traverse le circuit de puissance du moteur, sous l'influence duquel le relais de surintensité KA1 est activé. Son contact s'ouvre et le contacteur KM2 n'est pas alimenté.
Riz. 5. Schéma du démarrage DCT à excitation parallèle en fonction du courant
Lorsque le courant chute à la valeur minimale I2, le relais de surintensité KA1 chute et ferme son contact.Le contacteur KM2 est activé et via son contact principal shunte la première section de la résistance de démarrage et le relais KA1. Lors de la commutation, le courant monte à la valeur I1.
Lorsque le courant remonte à la valeur de I1, le contacteur KM1 ne s'enclenche pas, car sa bobine est contournée par le contact KM2. Sous l'influence du courant I1, le relais KA2 est activé et ouvre son contact. Lorsqu'en cours d'accélération le courant redescend à la valeur de I2, le relais KA2 redescend et le contacteur KMZ s'enclenche. Le démarrage est terminé, le moteur fonctionne avec ses caractéristiques mécaniques naturelles.
Pour le bon fonctionnement du circuit, il faut que le temps de réponse des relais KA1 et KA2 soit inférieur au temps de réponse des contacteurs. Pour arrêter le moteur, appuyez sur le bouton « Stop » SB2 et désactivez le disjoncteur QF pour déconnecter le circuit.
Le contrôle du temps est réalisé à l'aide d'un relais temporisé et de contacteurs correspondants qui court-circuitent les étages de résistance avec leurs contacts.
Considérez le nœud du circuit de démarrage du moteur à courant continu en fonction du temps (Fig. 6) Le relais temporisé KT est activé immédiatement lorsque la tension apparaît dans le circuit de commande via le contact d'ouverture KM1. Après ouverture du contact KM1, le relais temporisé KT perd son alimentation et ferme son contact avec une temporisation. Le contacteur KM2 après un intervalle de temps égal à la temporisation du relais temporisé est alimenté, ferme son contact et shunte la résistance dans le circuit d'induit.
Riz. 6. Le nœud du circuit de démarrage DCT d'excitation parallèle en fonction du temps
Les avantages du contrôle en fonction du temps comprennent la facilité de contrôle, la stabilité du processus d'accélération et de décélération, l'absence de retard de l'entraînement électrique à des vitesses intermédiaires.
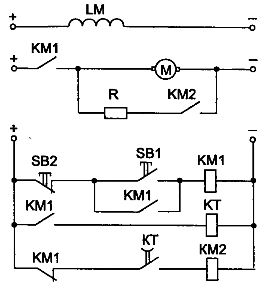
Considérons le circuit de démarrage d'une excitation parallèle de moteur à courant continu en fonction du temps. En figue. La figure 7 représente un schéma d'un moteur à courant continu à excitation parallèle à démarrage irréversible. Le lancement se déroule en deux temps. Le circuit utilise les boutons SB1 «Start» et SB2 «Stop», les contacteurs KM1 ... KMZ, les relais temporisés électromagnétiques KT1, KT2. Le disjoncteur QF s'active. Dans ce cas, la bobine du relais temporisé KT1 est alimentée et ouvre son contact dans le circuit du contacteur KM2. Le moteur est démarré en appuyant sur le bouton «Démarrer» SB1. Le contacteur KM1 est alimenté et, avec son contact principal, connecte le moteur à une source d'alimentation avec une résistance dans le circuit d'induit.
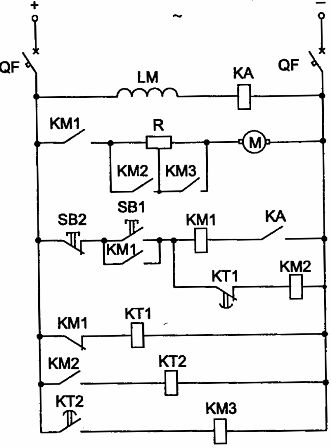
Riz. 7. Schéma de démarrage irréversible d'un moteur à courant continu en fonction du temps
Le relais à minimum de courant KA sert à protéger le moteur contre l'interruption du circuit d'excitation. Pendant le fonctionnement normal, le relais KA est excité et son contact dans le circuit du contacteur KM1 se ferme, préparant le contacteur KM1 pour le fonctionnement. Lorsque le circuit d'excitation est coupé, le relais KA s'éteint, ouvre son contact, puis le contacteur KM1 s'éteint et le moteur s'arrête. Lorsque le contacteur KM1 est actionné, son contact de blocage se ferme et le contact KM1 dans le circuit de relais KT1 s'ouvre, qui s'éteint et ferme son contact avec une temporisation.
Après un intervalle de temps égal à la temporisation du relais KT1, le circuit d'alimentation du contacteur d'accélération KM2 est fermé, qui se déclenche et avec son contact principal court-circuite un étage de la résistance de démarrage. En même temps, le relais temporisé KT2 est excité. Le moteur accélère. Après un intervalle de temps égal au retard du relais KT2, le contact KT2 se ferme, le contacteur d'accélération KMZ est activé et avec son contact principal contacte le deuxième étage de la résistance de démarrage dans le circuit d'induit. Le démarrage est terminé et le moteur retrouve ses caractéristiques mécaniques naturelles.
Unités typiques de circuit de commande de frein à courant continu
Les automatismes de moteurs à courant continu utilisent le freinage dynamique, le freinage inverse et le freinage régénératif.
En freinage dynamique, il faut fermer le bobinage d'induit du moteur à une résistance supplémentaire et laisser le bobinage d'excitation sous tension. Ce freinage peut se faire en fonction de la vitesse et en fonction du temps.
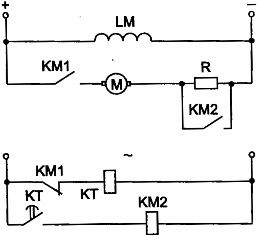
Le contrôle en fonction de la vitesse (EMF) pendant le freinage dynamique peut être effectué selon le schéma illustré à la fig. 8. Lorsque le contacteur KM1 est éteint, l'induit du moteur est déconnecté du secteur, mais il y a une tension à ses bornes au moment de la déconnexion. Le relais de tension KV fonctionne et ferme son contact dans le circuit du contacteur KM2, qui avec son contact ferme l'armature du moteur à la résistance R.
À des vitesses proches de zéro, le relais KV perd de la puissance. Une décélération supplémentaire de la vitesse minimale à l'arrêt complet se produit sous l'action d'un moment de résistance statique.Pour augmenter l'efficacité du freinage, deux ou trois étapes de freinage peuvent être appliquées.
Riz. 8. Noeud du circuit de contrôle automatique du freinage dynamique dans la fonction EMF : a — circuit de puissance ; b — circuit de commande
L'excitation constante du moteur de freinage dynamique en fonction du temps est effectuée selon le schéma illustré à la fig. neuf.
Riz. 9. Nœud du circuit de freinage dynamique DCT d'excitation indépendante en fonction du temps
Lorsque le moteur tourne, le relais temporisé KT est fermé, mais le circuit du contacteur de frein KM2 est ouvert. Pour arrêter, vous devez appuyer sur le bouton "Stop" SB2. Le contacteur KM1 et le relais temporisé KT perdent leur alimentation ; le contacteur KM2 est activé car le contact KM1 dans le circuit du contacteur KM2 se ferme et le contact du relais temporisé KT s'ouvre avec une temporisation.
Pour la temporisation du relais temporisé, le contacteur KM2 est alimenté, ferme son contact et connecte l'induit du moteur à la résistance supplémentaire R. Un arrêt dynamique du moteur est effectué. A son extrémité, le relais KT, après un certain temps, ouvre son contact et déconnecte le contacteur KM2 du réseau. Un freinage supplémentaire jusqu'à l'arrêt complet est effectué sous l'influence du moment de résistance Ms.
Lors d'un freinage en marche arrière, la FEM du moteur et la tension secteur agissent en conséquence. Pour limiter le courant, une résistance est insérée dans le circuit.
Contrôle d'excitation des moteurs à courant continu
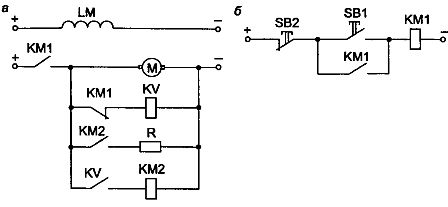
L'enroulement de champ du moteur a une inductance importante et si le moteur est éteint rapidement, une tension importante peut apparaître dessus, ce qui entraînera la rupture de l'isolation de l'enroulement. Pour éviter cela, vous pouvez utiliser les nœuds de circuit illustrés à la fig.10. La résistance d'extinction est activée en parallèle avec la bobine d'excitation à travers la diode (Fig. 10, b). Par conséquent, après la mise hors tension, le courant traverse la résistance pendant une courte période (Fig. 10, a).

Riz. 10. Nœuds de circuits pour activer les résistances d'extinction: a - la résistance d'extinction est connectée en parallèle; b — la résistance d'extinction est activée par la diode.
La protection contre l'interruption du circuit d'excitation est réalisée à l'aide d'un relais à minimum de courant selon le schéma illustré à la fig. onze.

Riz. 11. Protection contre l'interruption du circuit d'excitation : a — circuit d'excitation de puissance ; b — circuit de commande
En cas de rupture de la bobine d'excitation, le relais KA désexcite et déconnecte le circuit du contacteur KM.