Classification des systèmes de contrôle automatique

L'ensemble du dispositif de contrôle automatique et de l'objet de contrôle connectés et interagissant les uns avec les autres conformément à l'algorithme de contrôle est appelé système de contrôle automatique (ACS).
Les systèmes de contrôle automatique peuvent être classés selon la méthode de contrôle et les caractéristiques fonctionnelles. Selon la méthode de contrôle, tous les systèmes sont divisés en deux grandes classes: ordinaire (non autorégulateur) et autorégulateur (adaptatif).
Les systèmes ordinaires appartenant à la catégorie simple ne changent pas de structure au cours de la gestion. Ce sont les plus développés et les plus utilisés dans les fonderies et les ateliers thermiques. Les systèmes de contrôle automatique courants sont divisés en trois sous-classes : les systèmes de contrôle ouverts, fermés et combinés.
Les systèmes de contrôle automatique en boucle ouverte, à leur tour, sont divisés en systèmes de contrôle automatique rigide (SZHU) et en systèmes de contrôle des perturbations.
Dans les premiers systèmes, le régulateur agit sur l'objet de contrôle quel que soit le résultat obtenu, c'est-à-dire la valeur de la variable contrôlée et la perturbation externe. Les systèmes de contrôle des perturbations fonctionnent sur le principe que l'action de contrôle est générée en fonction des perturbations externes qui affectent l'objet de contrôle.
A titre d'exemple, considérons le système de chauffage d'une fonderie ou d'un atelier thermique. Dans ce cas, la consommation d'eau chaude dans le tuyau de chauffage du magasin dépend des conditions climatiques extérieures. Plus il fait froid dehors, plus il y a d'eau chaude fournie aux radiateurs et vice versa.
Les automatismes fermés fonctionnant selon le principe de déviation sont également appelés automatismes (ACS). Leur particularité est la présence d'un cycle fermé de passage du signal, c'est-à-dire la présence d'un canal de retour par lequel des informations sur l'état de la variable contrôlée sont transmises à l'entrée de l'élément de comparaison.
Les automatismes sont conçus pour résoudre trois problèmes : stabilisation de la valeur contrôlée (STA stabilisante), modification de la valeur contrôlée selon des programmes connus (ATS programmé) ou inconnus (ATS suiveur).
En stabilisation ATS, la consigne de la grandeur réglée est constante. Un exemple d'un tel système est le système de contrôle de la température dans l'espace de travail d'un four thermique. Dans le logiciel ATS, la valeur de la variable contrôlée change dans le temps selon un programme préconçu (connu).
Dans les systèmes d'asservissement, la valeur de consigne de la variable contrôlée change dans le temps selon un programme jusqu'alors inconnu.Les ATS de suivi et logiciels diffèrent des stabilisateurs par le principe de traitement du signal de référence.
L'exemple le plus typique d'asservissement est le maintien automatique d'un rapport donné entre la consommation de combustible et d'air lors de la régulation du processus de combustion dans les fours de fusion et de chauffage du combustible.
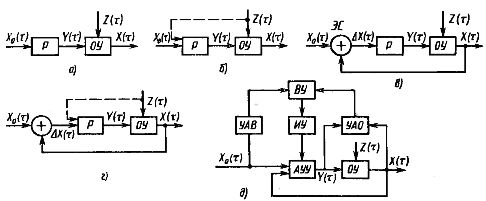
Systèmes de contrôle automatique: a - ouvert, b - biais ouvert, c - fermé, d - combiné, d - autorégulateur, P - contrôleur, OU - objet de contrôle, ES - élément de comparaison, UAV - dispositif d'analyse de l'action de contrôle : VU - dispositif informatique, IU est un dispositif exécutif, AUU est un dispositif de contrôle automatique, AUO est un dispositif d'analyse d'objet de contrôle.
Les systèmes combinés combinent les avantages des systèmes de contrôle des déviations et des perturbations, ce qui augmente la précision du contrôle. L'effet des perturbations non comptabilisées dans les systèmes combinés est compensé ou atténué par le contrôle du biais.
Les systèmes autorégulateurs (adaptatifs) peuvent être divisés en trois sous-classes : les systèmes extrêmes, les systèmes à réglage automatique et les systèmes à réglage automatique.
Les systèmes de régulation extrêmes sont appelés systèmes de stabilisation, de suivi ou de contrôle programmé dans lesquels le réglage, le programme ou la loi de reproduction change automatiquement en fonction des changements des conditions externes ou de l'état interne du système pour créer le mode de fonctionnement le plus favorable (optimal) de un objet de contrôle.
Dans de tels systèmes, au lieu d'un réglage ou d'un programme permanent, un dispositif de recherche automatique est installé, qui analyse chaque caractéristique de l'objet (efficacité, productivité, économie, etc.) et, en fonction du résultat obtenu, fournit la valeur requise d'un variable contrôlée au dispositif de contrôle, de sorte que cette caractéristique a une valeur exceptionnelle avec un changement continu de diverses influences perturbatrices qui affectent les conditions de fonctionnement du système.
Dans les systèmes avec des paramètres d'auto-réglage, lorsque les conditions externes ou les caractéristiques de l'objet contrôlé changent, il y a un changement automatique (pas selon un programme prédéterminé) des paramètres variables du dispositif de contrôle pour assurer un fonctionnement stable du système et maintenir la valeur contrôlée à un niveau donné ou optimal.
Dans les systèmes à structure auto-ajustable, lorsque les conditions externes et les caractéristiques de l'objet de contrôle changent, les éléments du schéma de connexion sont commutés ou de nouveaux éléments y sont introduits. Le but de ces changements (choix) de la structure est de parvenir à une meilleure solution au problème de gestion.
La sélection de la structure se fait par recherche automatique à l'aide d'opérations informatiques et logiques. De tels systèmes doivent non seulement s'adapter à tous les changements des conditions externes et des caractéristiques de l'objet, mais aussi fonctionner normalement même en présence de dysfonctionnements ou de dommages aux éléments individuels, créant de nouveaux circuits pour remplacer ceux qui sont cassés. Les systèmes d'autorégulation peuvent être conçus pour s'améliorer, "acquérir de l'expérience" en essayant rapidement plusieurs options, en choisissant et en "mémorisant" la meilleure.
Classification fonctionnelle tous les systèmes de contrôle automatique sont divisés en quatre classes :
-
des systèmes de coordination du travail des mécanismes,
-
systèmes de régulation des paramètres des processus technologiques,
-
systèmes de contrôle automatique,
-
systèmes de protection et de blocage automatiques.

Systèmes conçus pour coordonner le fonctionnement des mécanismes individuels de l'usine ou de l'usine dans son ensemble Systèmes de contrôle rigides automatiques (SZHU).
Les procédés technologiques des automatismes (ACS) assurent le maintien de la valeur contrôlée à un niveau donné ou son évolution selon un programme donné.
Les systèmes de contrôle automatique (ACS) contiennent des moyens et des méthodes pour obtenir des informations sur les valeurs actuelles des paramètres de processus technologiques (température, pression, teneur en poussière ou en gaz dans l'air, etc.) sans intervention humaine directe.
Les systèmes de protection automatique (SAZ) et les systèmes de blocage (SAB) empêchent l'apparition de situations d'urgence lors de l'utilisation d'équipements dans un état stable.