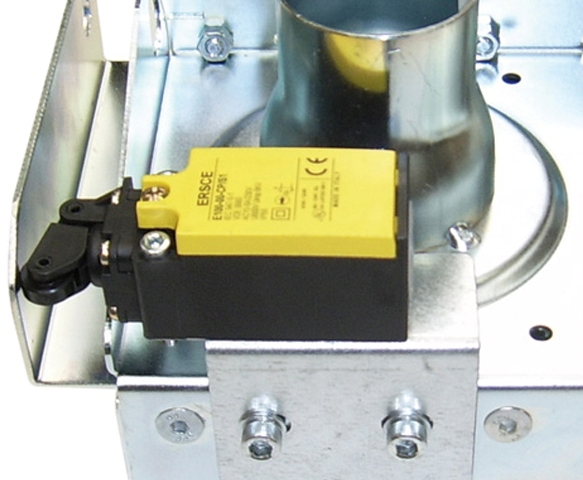
Comparaison des interrupteurs de course avec et sans contact
Dans l'automatisation industrielle, les circuits sont largement utilisés interrupteurs de déplacement (position) et interrupteurs conceptions multiples conçues pour contrôler la position de divers mécanismes de production et basées sur la transformation du mouvement de ces mécanismes dans un signal électrique.
Les interrupteurs de position peuvent également être utilisés pour exécuter des fonctions autres que le contrôle de position des mécanismes de production, par exemple, le contrôle de l'angle de rotation, du niveau, de la pression pondérale, etc.

Les interrupteurs de direction sont des dispositifs à action discrète, fonctionnant sur le principe de l'augmentation, c'est-à-dire qu'ils ne réagissent qu'à un changement de position du mécanisme commandé. Le signal de sortie des aiguillages est une fonction ambiguë du mouvement du mécanisme à partir d'une position initiale donnée.
Types d'aiguillages routiers
Selon les principes de la commutation de position, la méthode de commutation est subdivisée en :
-
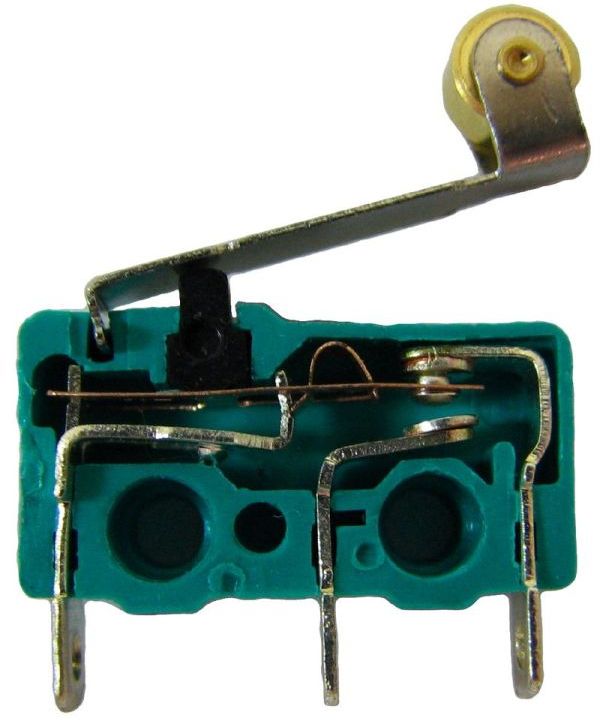
contact mécanique réalisé avec des contacts de commutation et des éléments sensibles au contact ;
-
contact statique (magnétomécanique) dont l'élément sensible est sans contact et l'élément interrupteur est un contact ;
-
éléments statiques sans contact, sensibles et de commutation à partir desquels sont fabriqués sans contact.
Dans la nature de contact du nœud "commutation - arrêt", c'est-à-dire dans la nature de contact de la connexion de l'élément moteur (signal de commande d'entrée) avec l'élément sensible, ce nœud est appelé mécanique, et sans contact - statique .
Selon la conception, les interrupteurs peuvent être combinés ou séparés. Dans le premier cas, les éléments sensibles et de commutation sont placés dans un boîtier et sont structurellement exécutés dans leur ensemble. Dans le second, l'élément sensible peut être situé à plusieurs dizaines et centaines de mètres de l'interrupteur.
La distorsion du champ magnétique du commutateur de chemin est obtenue en modifiant les paramètres circuit magnétique élément sensible. Les paramètres variables peuvent être la surface active et la taille de l'entrefer ainsi perméabilité magnétique circuit magnétique.
Actuellement, le domaine d'application des interrupteurs de position à contact mécanique dans l'automatisation industrielle se rétrécit et la question se pose de l'inutilité d'interrupteurs de position de ce type pour la construction d'automatismes.
Ce dernier est causé par ce qui suit :
-
La complexité de la conception de l'ensemble interrupteur-arrêt, en raison de la rigueur des exigences concernant les limites de fluctuations admissibles d'un certain nombre de paramètres, ce qui entraîne des difficultés importantes dans sa fabrication et son réglage.
-
La criticité relativement élevée des caractéristiques de précision de cet appareil à l'influence de facteurs déstabilisants (usure des surfaces de contact, desserrement des fixations, désalignement des éléments mobiles, etc.).
Un certain nombre de solutions de conception de mécanismes ne peuvent pas du tout être mises en œuvre sur la base d'interrupteurs à contact mécaniques. Ceux-ci incluent des mécanismes qui nécessitent des niveaux élevés de vitesse et de fréquence de commutation de mouvement.
Si la vitesse de fonctionnement requise de l'aiguillage routier peut être réduite en raison de liaisons cinématiques supplémentaires du mécanisme, qui, entre autres, détériorent les caractéristiques de qualité du système de commande (en particulier, les paramètres de précision), alors la fréquence de fonctionnement admissible ( résolution) ne peut pas être augmentée par des complications structurelles.
Voir également: Installation d'interrupteurs de fin de course et d'interrupteurs
Dans ce cas, quelle est la raison de la généralisation du principe de contact mécanique de commutation de position ? La réponse à cette question doit être recherchée sous deux aspects : dans les principes de construction existants des systèmes de commande automatique et dans les avantages du circuit de commutation de chemin de contact.
Avantages des commutateurs de chemin de contact
Les interrupteurs à contact mécanique, généralement mis en œuvre avec une sortie multi-circuit, se caractérisent par les avantages suivants :
-
rapport de commutation élevé ;
-
puissance de commande spécifique élevée (le rapport de la puissance incluse aux dimensions globales);
-
l'universalité, c'est-à-dire la capacité de commuter les circuits à courant continu et alternatif;
-
large gamme de tensions incluses ;
-
consommation d'énergie interne négligeable (faible valeur de la résistance transitoire des contacts à l'état fermé) ;
-
faible dépendance de la précision et de la stabilité de fonctionnement aux changements de puissance contrôlée.
Inconvénients des commutateurs de chemin de contact
Le principe de contact mécanique de ces appareils ne permet souvent pas de répondre aux exigences accrues de fiabilité, de durabilité et de précision des automatismes. De plus, les interrupteurs à contact mécanique sont très sensibles aux effets de divers facteurs climatiques (notamment à basse température).
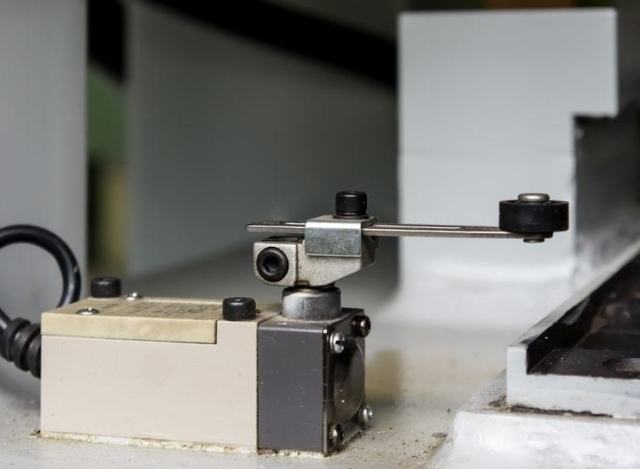
Les interrupteurs à contact mécaniques sont caractérisés par des niveaux limités autorisés de vitesse de déplacement maximale et minimale de l'arrêt de commutation, qui se situent dans la plage de 0,3 à 30 m / min, et l'augmentation de la vitesse de l'arrêt de commutation au-dessus du niveau autorisé entraîne une forte diminution de durabilité mécanique sur l'interrupteur.
Dans de tels interrupteurs, les écarts admissibles du sens d'action de la force de commutation par rapport à l'axe du levier sont très faibles et leur dépassement entraîne des dommages mécaniques, en particulier dans les interrupteurs à tige de traction avant.
Afin d'obtenir des caractéristiques de sortie de relais (caractéristiques de commande), des dispositifs à ressort de déclenchement sont prévus dans la conception de ces commutateurs. Le degré requis de caractéristiques de sortie de relais est atteint au prix d'une réduction significative de la durabilité de l'interrupteur en raison des contraintes dynamiques importantes se produisant dans la gâchette au moment de l'actionnement.
Dans les interrupteurs mécaniques à contact momentané, la largeur de la boucle d'hystérésis (différentiel de course) de la caractéristique de sortie atteint une valeur significative, ce qui est totalement inacceptable pour un certain nombre de processus technologiques en raison d'une augmentation improductive de la durée du cycle de traitement.
La réduction de la différence de course de ces dérailleurs est liée soit à l'augmentation de la complexité de leur conception, soit à l'augmentation de leur taille. De plus, dans certains cas, des forces mécaniques importantes sont nécessaires pour actionner des interrupteurs à contact mécanique.
Avantages et inconvénients des détecteurs de proximité
Les circonstances énumérées ci-dessus conduisent à la nécessité de développer des dispositifs dépourvus des inconvénients mentionnés et en même temps capables de remplir des fonctions similaires. De tels appareils sont interrupteurs de proximité, dont les avantages incluent :
-
durabilité importante avec une grande fiabilité et une fréquence de fonctionnement admissible élevée ;
-
pas besoin d'effort mécanique lors de l'actionnement, faible sensibilité aux vibrations, accélérations, etc. ;
-
sensibilité insignifiante des paramètres aux changements dans une gamme relativement large de conditions externes;
-
améliorer les conditions des services opérationnels.
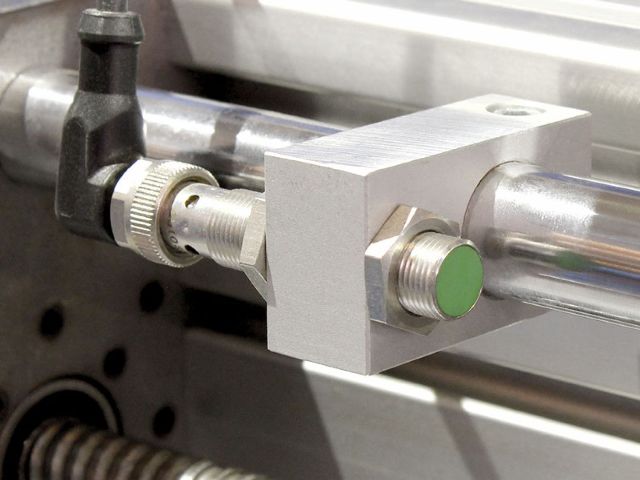
En raison du faible niveau de rétroaction du commutateur de proximité, une simplification significative de la construction du commutateur d'arrêt est obtenue tout en maintenant une stabilité élevée dans le temps des caractéristiques de précision. De plus, l'absence de contacts électriques et mécaniques garantit la sécurité incendie et explosion de ces appareils, ce qui élargit considérablement le domaine de leur application possible.
L'un des inconvénients majeurs des interrupteurs de fin de course sans contact est la complexité de la mise en œuvre de nombreuses modifications de conception qui sont facilement mises en œuvre dans les interrupteurs de fin de course mécaniques à contact.
Dispositif de commutation de proximité
Le principe de fonctionnement des interrupteurs statiques de voie sans contact de type paramétrique est basé sur l'utilisation de la distorsion du champ magnétique ou électrique créé par l'élément sensible lorsqu'un élément moteur apparaît dans sa zone, à la suite de quoi un état déséquilibré se produit dans le circuit électrique de l'interrupteur et le dispositif de sortie est déclenché.
Les détecteurs de proximité statiques sont le plus souvent fabriqués avec un seul circuit de sortie, et dans certains commutateurs, l'actionnement s'accompagne de l'apparition d'un signal à la sortie (effet de commutation directe), dans d'autres - d'une disparition (effet de commutation inverse), ce qui équivaut respectivement à la fermeture et à l'ouverture des contacts des pistes de contact mécaniques.
S'il y a un élément amplificateur dans le circuit du commutateur de proximité en mode relais, le paramètre de sortie de l'élément de détection peut être en dépendance fonctionnelle continue du mouvement commandé.
Actuellement, de nombreuses modifications de conception des interrupteurs de course sans contact sont utilisées, différant par le niveau de sensibilité (la taille de l'espace de travail), l'emplacement de la fente ou le plan de l'élément sensible par rapport au plan de montage, la direction de les fils conducteurs, le nombre de pas de l'élément sensible (pour la conception avec des fentes), la profondeur de la fente, la longueur des fils de connexion, le niveau de la tension d'alimentation, la nature de la protection contre les influences environnementales, etc.
Les possibilités d'utilisation des interrupteurs de mouvement sans contact sont déterminées par les paramètres de leurs caractéristiques électriques et mécaniques.
Les paramètres électriques comprennent :
- la nature du signal de sortie et le nombre de circuits de sortie ;
- consommation et puissance de sortie ;
- forme du signal de sortie ; coefficient de commutation pour la résistance et la tension (pour les commutateurs de type transformateur);
- caractéristiques de synchronisation (temps de déclenchement et de relâchement) et fréquence de tir (résolution);
- les niveaux et la forme de la tension d'alimentation, ainsi que les limites admissibles de leurs écarts.
Les paramètres de performances mécaniques comprennent :
- sensibilité (taille de l'écart de travail),
- dimensions et cotes de raccordement ;
- caractéristiques de précision (erreurs majeures et supplémentaires) et différentiel de course ;
- caractéristiques d'installation (types de freins de commutation et mode d'installation, niveau de rétroaction, montage et installation de l'interrupteur);
- le niveau de protection contre le bruit.
Pour plus d'informations sur le dispositif de commutation de proximité et les commutateurs, voir ici : Capteurs sans contact pour la position des mécanismes
Ivenski Yu. N.Interrupteurs de fin de course sans contact dans l'automatisation industrielle