Inverser et arrêter le moteur à induction à cage d'écureuil
Un moteur à induction est une machine réversible. Pour changer le sens de rotation du rotor, il faut changer le sens de rotation du champ magnétique (en commutant les fils d'alimentation aux bornes des deux phases du moteur) — Circuits de démarrage et de freinage du moteur
Les caractéristiques mécaniques pour deux sens de rotation sont représentées sur la Fig. 1.
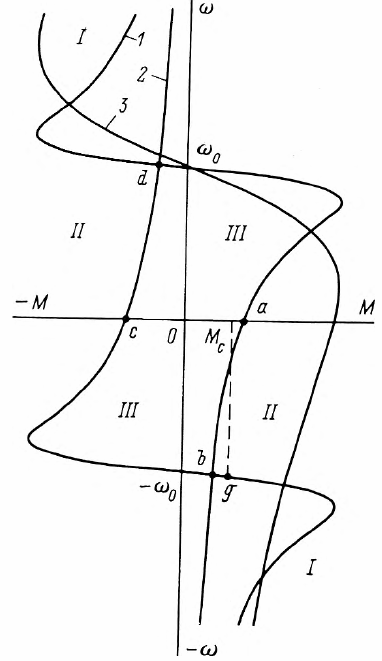
Riz. 1. Famille de caractéristiques mécaniques d'un moteur à induction à fonctionnement réversible en mode arrêt avec alimentation en énergie du réseau (I), mode opposition (II) et moteur (III) 1, 2 - naturel; 3 — artificiel.
Un moteur à induction à cage d'écureuil peut être utilisé non seulement comme moteur mais aussi comme frein. En mode arrêt, chaque moteur électrique fonctionne toujours en générateur. Dans ce cas, un moteur électrique à induction à rotor à cage d'écureuil peut avoir trois modes de freinage.
En mode de freinage récupératif, la machine fonctionne avec un glissement négatif. Dans ce cas, la vitesse du rotor dépasse la vitesse de rotation du champ magnétique.Bien entendu, pour passer dans ce mode, un moment actif externe doit être appliqué sur le côté de l'arbre.
Le mode de rétroaction est largement utilisé dans les installations de levage. Lors de la descente, le système de propulsion, du fait de l'énergie potentielle de la charge, peut acquérir une vitesse supérieure à la vitesse de rotation du champ magnétique, et la descente se fera dans un état d'équilibre correspondant à un certain point g sur la caractéristique mécanique , lorsque le moment statique créé par la charge descendante est équilibré par le couple de freinage moteur.
Dans les entraînements classiques à couple statique réactif, le mode en question n'est mis en œuvre qu'au moyen de circuits de commande spéciaux, qui permettent de réduire la vitesse de rotation du champ magnétique. Les caractéristiques mécaniques d'une machine à induction pour le mode de rétroaction sont représentées sur la même figure. 1.
Comme indiqué, le couple maximal en mode générateur est légèrement supérieur à celui en mode moteur, et le glissement critique en valeur absolue est le même.
Les générateurs asynchrones en tant que tels ont une plage très étroite, à savoir centrales éoliennes... La force du vent n'étant pas constante et, par conséquent, la vitesse de rotation de l'appareil change considérablement, un générateur asynchrone est préférable dans ces conditions.
Le plus utilisé est le mode de freinage — opposition. Le passage à ce mode des moteurs asynchrones, ainsi que des moteurs à courant continu, est possible dans deux cas (Fig.1): avec une augmentation significative du couple statique (section ab) ou lors de la commutation de l'enroulement du stator pour un sens de rotation différent ( section cd).
Dans les deux cas, le moteur fonctionne avec un glissement supérieur à 1 jusqu'à ce que les courants dépassent les courants de démarrage. Ainsi, pour un moteur à cage d'écureuil, ce mode ne peut être utilisé que pour arrêter rapidement le variateur.
Lorsque la vitesse nulle est atteinte, le moteur doit être déconnecté du réseau, sinon il aura tendance à accélérer dans le sens opposé.
Lors du freinage par des moteurs à rotors opposés, une résistance rhéostat doit être introduite dans le circuit du rotor pour limiter le courant et augmenter le couple de freinage.
Il est également possible mode de freinage dynamique… Cependant, cela soulève quelques difficultés. Lorsque le moteur est débranché du secteur, le champ magnétique de la machine disparaît également. Il est possible d'exciter une machine à induction à partir d'une source de courant continu qui est reliée à un stator déconnecté du réseau de courant alternatif. La source doit fournir un courant dans l'enroulement du stator proche de la valeur nominale. Comme ce courant n'est limité que par la résistance électrique de la bobine, la tension de la source continue doit être faible (typiquement 10 — 12 V).
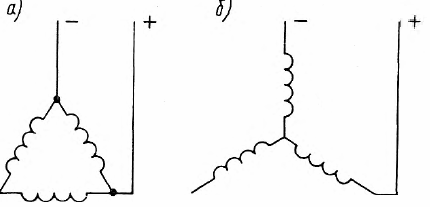
Riz. 2. Connexion du stator d'un moteur à induction à une source de courant continu en mode de freinage dynamique lorsqu'il est connecté en triangle (a) et en étoile (b)
L'auto-excitation est également utilisée pour le freinage dynamique. Les condensateurs sont connectés au stator déconnecté du secteur.
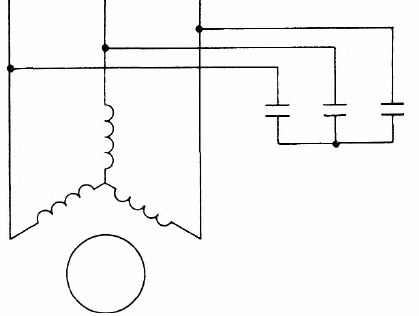
Riz. 3. Schéma du freinage dynamique d'un moteur à induction auto-excité
Lorsque le rotor tourne, une FEM est créée dans le circuit du stator en raison de la magnétisation résiduelle et du flux de courant à travers les enroulements du stator ainsi qu'à travers les condensateurs.Lorsqu'une certaine vitesse est atteinte dans le circuit du stator, des conditions de résonance se produisent : la somme des résistances inductives sera égale à la résistance capacitive. Un processus intensif d'auto-excitation de la machine va commencer, ce qui entraînera une augmentation des champs électromagnétiques. Le mode d'auto-excitation se terminera lorsque la FEM de la machine E et la chute de tension aux bornes des condensateurs seront égales.
Le couple de freinage maximal avec l'augmentation de la capacité passe à des vitesses inférieures. Les inconvénients du mode de freinage considéré sont l'apparition d'une action de freinage uniquement dans une certaine zone de vitesse et la nécessité d'utiliser de gros condensateurs pour le freinage à basse vitesse.
Du côté positif, aucune source d'alimentation électrique supplémentaire n'est requise. Ce mode est toujours mis en œuvre dans les installations où une batterie de condensateurs est connectée au moteur pour améliorer le facteur de puissance du réseau d'alimentation.
Voir aussi sur ce sujet : Circuits de freinage pour moteurs asynchrones