Régulateurs de tension à thyristors
 Les régulateurs de tension à thyristors sont des dispositifs destinés à contrôler la vitesse et le couple des moteurs électriques. La régulation de la vitesse et du couple s'effectue en modifiant la tension fournie au stator du moteur et en modifiant l'angle d'ouverture des thyristors. Cette méthode de contrôle du moteur est appelée contrôle de phase. Cette méthode est un type de contrôle paramétrique (amplitude).
Les régulateurs de tension à thyristors sont des dispositifs destinés à contrôler la vitesse et le couple des moteurs électriques. La régulation de la vitesse et du couple s'effectue en modifiant la tension fournie au stator du moteur et en modifiant l'angle d'ouverture des thyristors. Cette méthode de contrôle du moteur est appelée contrôle de phase. Cette méthode est un type de contrôle paramétrique (amplitude).
Les régulateurs de tension à thyristor peuvent être mis en œuvre avec des systèmes de contrôle fermés et ouverts. Les régulateurs à boucle ouverte ne fournissent pas des performances de contrôle de vitesse satisfaisantes. Leur objectif principal est d'ajuster le couple pour obtenir le mode de fonctionnement souhaité du variateur dans les processus dynamiques.
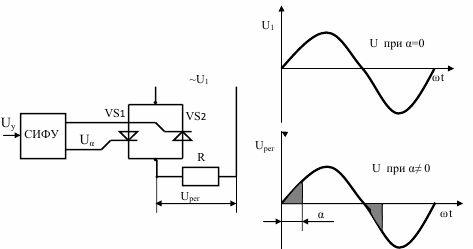
Un schéma simplifié d'un régulateur de tension à thyristor
La section de puissance du régulateur de tension à thyristors monophasé comprend deux thyristors commandés qui assurent la circulation du courant électrique sur la charge dans les deux sens à une tension d'entrée sinusoïdale.
Les contrôleurs à thyristor en boucle fermée sont utilisés, en règle générale, avec un retour de vitesse négatif, ce qui permet d'avoir des caractéristiques mécaniques suffisamment rigides du variateur dans le domaine des faibles vitesses de rotation.
L'utilisation la plus efficace des régulateurs à thyristor pour le contrôle de la vitesse et du couple moteurs asynchrones à rotor.
Circuits d'alimentation des régulateurs à thyristors
En figue. 1, a-e montrent des schémas possibles pour inclure les éléments redresseurs du régulateur dans une phase. Le plus courant d'entre eux est le schéma de la fig. 1, un. Il peut être utilisé pour n'importe quel schéma de connexion des enroulements du stator. Le courant admissible à travers la charge (valeur efficace) dans ce circuit en mode courant continu est :

où Azt est la valeur moyenne admissible du courant traversant le thyristor.
Tension maximale des thyristors avant et arrière

où kzap — facteur de sécurité choisi en tenant compte des surtensions de commutation possibles dans le circuit ; — la valeur efficace de la tension de ligne du réseau.
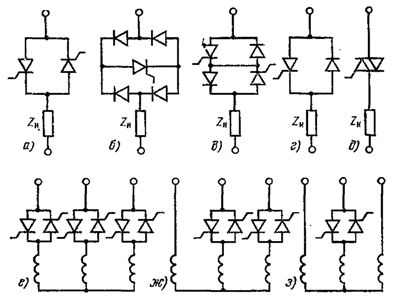
Riz. 1. Schémas des circuits de puissance des régulateurs de tension à thyristors.
Dans le schéma de la fig. 1b, il n'y a qu'un seul thyristor inclus dans la diagonale du pont de diodes non commandées. Le rapport entre les courants de charge et de thyristor pour ce circuit est :

Les diodes non contrôlées sont sélectionnées pour un courant qui est la moitié de celui d'un thyristor. Tension directe maximale au thyristor
La tension inverse du thyristor est proche de zéro.
Le schéma de la fig. 1b présente quelques différences par rapport au schéma de la fig. 1, mais pour la construction du système de gestion. Dans le schéma de la fig. 1, et les impulsions de commande de chacun des thyristors doivent suivre la fréquence de l'alimentation. Dans le schéma de la fig.1b, la fréquence des impulsions de commande est deux fois plus élevée.
Le schéma de la fig. 1, c, composé de deux thyristors et de deux diodes, si possible, la commande, la charge, le courant et la tension directe maximale des thyristors sont similaires au schéma de la fig. 1, un.
La tension inverse dans ce circuit due à l'action de shunt de la diode est proche de zéro.
Le schéma de la fig. 1d en termes de courant et de tension directe et inverse maximale des thyristors est similaire au circuit de la fig. 1, un. Le schéma de la fig. 1, d diffère des exigences considérées pour que le système de commande fournisse la plage de variation nécessaire de l'angle de commande du thyristor.Si l'angle est compté à partir de la tension de phase nulle, alors pour les circuits de la fig. 1, a-c, la relation
où φ- angle de phase de la charge.
Pour le circuit de la Fig. 1, d, un rapport similaire prend la forme :
La nécessité d'augmenter la plage de changement d'angle complique système de commande à thyristors… Le schéma de la fig. 1, d peut être appliqué lorsque les enroulements du stator sont connectés en étoile sans conducteur neutre et en triangle avec les redresseurs inclus dans les conducteurs de ligne. Le champ d'application de ce schéma est limité aux entraînements électriques irréversibles et réversibles avec contact inverse.
Le schéma de la fig. 4-1, e dans ses propriétés est similaire au schéma de la fig. 1, un. Le courant du triac est ici égal au courant de charge et la fréquence des impulsions de commande est égale à deux fois la fréquence de la tension d'alimentation. L'inconvénient d'un circuit triac est beaucoup plus petit que celui des thyristors classiques, les valeurs admissibles du / dt et di / dt.
Pour les régulateurs à thyristor, le schéma le plus rationnel est celui de la fig. 1, mais avec deux thyristors montés en anti-parallèle.
Les circuits de puissance des régulateurs sont réalisés avec des thyristors anti-parallèles dans les trois phases (circuit triphasé symétrique), dans deux et une phase du moteur, comme indiqué sur la fig. 1, f, g et h respectivement.
Dans les régulateurs utilisés dans les entraînements électriques de grue, le plus répandu est le circuit de commutation symétrique illustré à la fig. 1, e, qui se caractérise par les pertes les plus faibles dues aux courants harmoniques supérieurs. Les pertes plus importantes dans les circuits à quatre et deux thyristors sont déterminées par le déséquilibre de tension dans les phases du moteur.
Caractéristiques techniques de base des régulateurs à thyristor de la série PCT
Les régulateurs à thyristors de la série PCT sont des dispositifs permettant de modifier (selon une loi donnée) la tension fournie au stator d'un moteur à induction à rotor bobiné. Les contrôleurs de thyristors de la série PCT sont fabriqués selon un circuit de commutation triphasé symétrique (Fig. 1, e). L'utilisation de régulateurs de la série spécifiée dans les entraînements électriques de grue permet de réguler la fréquence de rotation dans la plage 10: 1 et de réguler le couple moteur en modes dynamiques lors du démarrage et de l'arrêt.
Les régulateurs à thyristor de la série PCT sont conçus pour des courants continus de 100, 160 et 320 A (courants maximum de 200, 320 et 640 A respectivement) et des tensions de 220 et 380 V AC. Le régulateur est composé de trois blocs d'alimentation montés sur un châssis commun (selon le nombre de phases des thyristors montés en anti-parallèle), d'un bloc capteur de courant et d'un bloc automatisme. Les alimentations utilisent des thyristors à pastilles avec des refroidisseurs profilés en aluminium extrudé. Refroidissement par air — naturellement. Le bloc d'automatisation est le même pour toutes les versions des régulateurs.
Les régulateurs à thyristors sont fabriqués avec un degré de protection IP00 et sont destinés à être montés sur des châssis de contrôleurs magnétiques standard de type TTZ, de conception similaire aux contrôleurs des séries TA et TCA. Les dimensions globales et le poids des régulateurs de la série PCT sont indiqués dans le tableau. 1.
Tableau 1 Dimensions hors tout et poids des régulateurs de tension de la série PCT

Les contrôleurs magnétiques TTZ sont équipés de contacteurs directionnels pour inverser le moteur, de contacteurs du circuit du rotor et d'autres éléments de contact relais de l'entraînement électrique, qui communiquent le contrôleur avec le régulateur à thyristor. La structure de construction du système de commande du régulateur est visible sur le schéma fonctionnel de l'entraînement électrique illustré à la Fig. 2.
Le bloc de thyristors symétrique triphasé T est commandé par le système de commande de phase SFU. En utilisant le contrôleur KK dans le régulateur, le réglage de la vitesse de BZS est modifié.Par le bloc BZS, en fonction du temps, l'accélérateur KU2 dans le circuit du rotor est contrôlé. La différence entre les signaux de référence et la génératrice tachymétrique TG est amplifiée par les amplificateurs U1 et UZ.Un dispositif à relais logique est connecté à la sortie de l'amplificateur UZ, qui a deux états stables : l'un correspond à l'enclenchement du contacteur sens direct KB, le deuxième - à l'enclenchement du contacteur avant dans le sens arrière KN.
Simultanément à un changement d'état du dispositif logique, le signal dans le circuit de commande de l'appareillage est inversé. Le signal provenant de l'amplificateur d'adaptation U2 est additionné au signal de rétroaction retardé du courant du stator du moteur provenant du bloc de limitation de courant TO et envoyé à l'entrée du SFU.
Le bloc logique BL est également affecté par le signal du capteur de courant DT et du module de présence de courant NT, qui interdit la commutation des contacteurs directionnels sous tension. L'unité BL effectue également une correction non linéaire du système de stabilisation de la vitesse pour assurer la stabilité de l'entraînement. Les régulateurs peuvent être utilisés dans les entraînements électriques des mécanismes de levage et de déplacement.
Les régulateurs de la série PCT sont fabriqués avec un système de limitation de courant. Le niveau de limitation de courant pour la protection des thyristors contre les surcharges et pour limiter le couple moteur dans les modes dynamiques varie progressivement de 0,65 à 1,5 du courant nominal du régulateur, le niveau de limitation de courant pour la protection contre les surintensités — de 0 ,9 à. 2,0 courant nominal du régulateur. Une large gamme de réglages de protection permet le fonctionnement d'un régulateur de même taille standard avec des moteurs dont la puissance diffère d'un facteur d'environ 2.
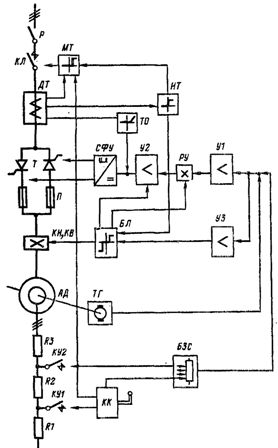
Riz. 2. Schéma fonctionnel d'un entraînement électrique avec régulateur à thyristors de type PCT : KK — contrôleur de commande ; TG — génératrice tachymétrique ; KN, KB — contacteurs directionnels ; BZS — bloc de réglage de la vitesse ; BL — bloc logique ; U1, U2. États-Unis — amplificateurs ; SFU — système de contrôle de phase ; DT — capteur de courant ; IT — unité actuelle de présence ; TO — unité de limitation de courant ; MT — unité de protection ; KU1, KU2 — contacteurs d'accélération ; KL — contacteur linéaire : R — disjoncteur.
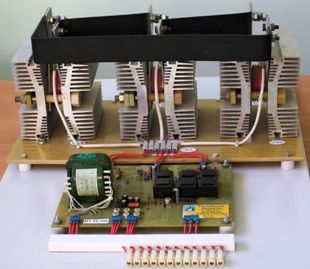
Riz. 3. Régulateur de tension à thyristor PCT
La sensibilité du système de présence de courant est de 5 à 10 A eff. courant dans la phase. Le régulateur assure également une protection : zéro, contre les surtensions de commutation, contre la perte de courant dans au moins une des phases (blocs IT et MT), contre les perturbations en réception radio.Les fusibles ultra-rapides de type PNB 5M assurent une protection contre les courants de court-circuit.