Caractéristiques mécaniques d'un moteur à induction à différents modes, tensions et fréquences
 Les caractéristiques mécaniques des moteurs à induction peuvent être exprimées par n = f (M) ou n = e (I). Cependant, les caractéristiques mécaniques des moteurs asynchrones sont souvent exprimées sous la forme d'une dépendance M = f(S), où C = glissement, S = (nc-n) / nc, où ns = vitesse synchrone.
Les caractéristiques mécaniques des moteurs à induction peuvent être exprimées par n = f (M) ou n = e (I). Cependant, les caractéristiques mécaniques des moteurs asynchrones sont souvent exprimées sous la forme d'une dépendance M = f(S), où C = glissement, S = (nc-n) / nc, où ns = vitesse synchrone.
En pratique, une formule simplifiée appelée formule de Kloss est utilisée pour la construction graphique des caractéristiques mécaniques :

ici : Mk — valeur de couple critique (maximale). Cette valeur de moment correspond au glissement critique

où λm = Mk / Mn
La formule de Kloss est utilisée pour résoudre les problèmes liés à l'entraînement électrique effectué à l'aide d'un moteur à induction. À l'aide de la formule de Kloss, vous pouvez créer un graphique des caractéristiques mécaniques en fonction des données de passeport du moteur à induction. Pour des calculs pratiques, seul le signe plus doit être pris en compte dans la formule lors de la détermination du moment critique avant la racine.
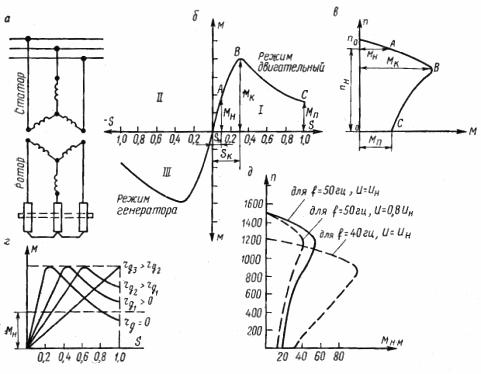
Riz. 1.Moteur asynchrone : a — schéma de principe, b — caractéristique mécanique M = f (S) — naturelle en modes moteur et générateur, c — caractéristique mécanique naturelle n = f (M) en mode moteur, d — caractéristiques mécaniques d'un rhéostat artificiel , e — caractéristiques mécaniques pour différentes tensions et fréquences.

Moteur à induction à cage d'écureuil
Comme on peut le voir sur la fig. 1, caractéristiques mécaniques d'un moteur à induction situé dans les quadrants I et III. La partie de la courbe dans le quadrant I correspond à une valeur de glissement positive et caractérise le mode de fonctionnement du moteur asynchrone, et dans le quadrant III, le mode générateur. Le mode moteur présente le plus grand intérêt pratique.
Le graphique des caractéristiques mécaniques du mode moteur contient trois points caractéristiques: A, B, C et peut être conditionnellement divisé en deux sections: OB et BC (Fig. 1, c).
Le point A correspond au couple nominal du moteur et est déterminé par la formule Mn = 9,55•103•(Strn /nn)
Ce moment correspond glissement nominal, qui pour les moteurs à application industrielle générale a une valeur comprise entre 1 et 7 %, c'est-à-dire Sn = 1 — 7 %. Dans le même temps, les petits moteurs ont plus de patinage et les gros en ont moins.
Les moteurs à glissement élevé destinés à la charge de choc ont Сn ~ 15%. Ceux-ci incluent, par exemple, les moteurs à courant alternatif en série unique.
Le point C de la caractéristique correspond à la valeur du couple initial apparaissant sur l'arbre moteur au démarrage. Cet instant Mp est dit initial ou de démarrage. Dans ce cas, le glissement est égal à l'unité et la vitesse est nulle. Couple de démarrage il est facile à déterminer à partir des données du tableau de référence, qui indique le rapport du couple de démarrage au nominal Mp / Mn.
L'amplitude du couple de démarrage à des valeurs constantes de tension et de fréquence de courant dépend de la résistance active dans le circuit du rotor. Dans ce cas, initialement lorsque la résistance active augmente, la valeur du couple de démarrage augmente, atteignant son maximum lorsque la résistance active du circuit rotorique est égale à la résistance inductive totale du moteur. Par la suite, à mesure que la résistance active du rotor augmente, la valeur du couple initial diminue, tendant vers zéro à la limite.
Le point C (Fig. 1, b et c) correspond à un moment maximal que peut développer le moteur dans toute la plage de révolutions de n = 0 à n = ns... Ce moment est appelé moment critique (ou de renversement) Mk . Le moment critique correspond également au glissement critique Sk. Plus la valeur du glissement critique Sk est petite, ainsi que la valeur du glissement nominal Сn, plus la rigidité des caractéristiques mécaniques est élevée.
Les moments de démarrage et critiques sont déterminés par les moments nominaux. Selon GOST pour les machines électriques à moteur à cage d'écureuil, la condition Mn / Mn = 0,9 - 1,2, Mk / Mn = 1,65 - 2,5 doit être remplie.
Il convient de noter que la valeur du moment critique ne dépend pas de la résistance active du circuit rotorique, tandis que le glissement critique Сk est directement proportionnel à cette résistance.Cela signifie qu'avec une augmentation de la résistance active du circuit du rotor, la valeur du moment critique reste inchangée, mais le maximum de la courbe de couple passe à des valeurs de glissement croissantes (Fig. 1, d).
L'amplitude du couple critique est directement proportionnelle au carré de la tension appliquée au stator et inversement proportionnelle au carré de la fréquence des tensions et de la fréquence du courant dans le stator.
Si, par exemple, la tension fournie au moteur est égale à 85 % de la valeur nominale, l'amplitude du couple critique sera de 0,852 = 0,7225 = 72,25 % de couple critique à la tension nominale.
L'inverse est observé lors du changement de fréquence. Si, par exemple, à un moteur conçu pour fonctionner avec une fréquence de courant de = 60 Hz, un courant d'alimentation avec une fréquence de = 50 Hz, alors le moment critique arrivera à (60/50)2 = 1,44 fois supérieur à la valeur officielle sa fréquence (Fig. 1, e).
Le moment critique caractérise la capacité de surcharge instantanée du moteur, c'est-à-dire qu'il montre quel moment (en quelques secondes) de surcharge le moteur est capable de supporter sans conséquences néfastes.

La section de la caractéristique mécanique de zéro à la valeur maximale (critique) (voir Fig. 1, biv) est appelée la partie stable de la caractéristique, et la section BC (Fig. 1, c) - la partie instable.
Cette division s'explique par le fait que sur la partie croissante des caractéristiques OF avec un glissement croissant, c'est-à-dire à mesure que la vitesse diminue, le couple développé par le moteur augmente.Cela signifie que lorsque la charge augmente, c'est-à-dire lorsque le couple de freinage augmente, la vitesse de rotation du moteur diminue et le couple augmenté par celle-ci augmente. Lorsque la charge diminue, au contraire, la vitesse augmente et le couple diminue. Lorsque la charge change sur toute la plage de la partie stable de la caractéristique, la vitesse de rotation et le couple du moteur changent.
Le moteur ne peut pas développer plus que le couple critique, et si le couple de freinage est supérieur, le moteur doit inévitablement s'arrêter. Un renversement de moteur se produit, comme on dit.
Une caractéristique mécanique à U et I constants et l'absence de résistance supplémentaire dans le circuit du rotor est appelée caractéristique naturelle (caractéristique d'un moteur à induction à cage d'écureuil avec un rotor bobiné sans résistance supplémentaire dans le circuit du rotor). Les caractéristiques artificielles ou rhéostatiques sont appelées celles qui correspondent à la résistance supplémentaire dans le circuit du rotor.
Toutes les valeurs de couple de démarrage sont différentes et dépendent de la résistance active du circuit du rotor. Des curseurs de grandeurs différentes correspondent à un même couple nominal Mn. Lorsque la résistance du circuit du rotor augmente, le glissement augmente et donc la vitesse du moteur diminue.
En raison de l'inclusion d'une résistance active dans le circuit du rotor, la caractéristique mécanique dans la partie stable est étirée dans le sens d'un glissement croissant, proportionnelle à la résistance.Cela signifie que la vitesse du moteur commence à varier considérablement en fonction de la charge de l'arbre et que la caractéristique dure devient douce.