Entraînement de chariot électrique avec ponts roulants
Un chariot avec un pont roulant est un élément indépendant d'un appareil de levage et est conçu pour déplacer des charges dans la portée du pont roulant avec une vitesse de déplacement technologiquement déterminée et la précision nécessaire pour positionner la charge. L'entraînement par bogie est l'un des principaux composants des équipements de pont roulant.
Le chariot se déplace sur le rail d'un pont roulant. Le pont lui-même se déplace dans une direction perpendiculaire à la direction de déplacement du chariot. Un mécanisme de levage est installé sur le chariot, qui est équipé d'un crochet (ou d'un électroaimant) avec lequel vous pouvez déplacer la charge. Le mouvement du bogie fait partie intégrante du cycle technologique du pont roulant (Fig. 1).
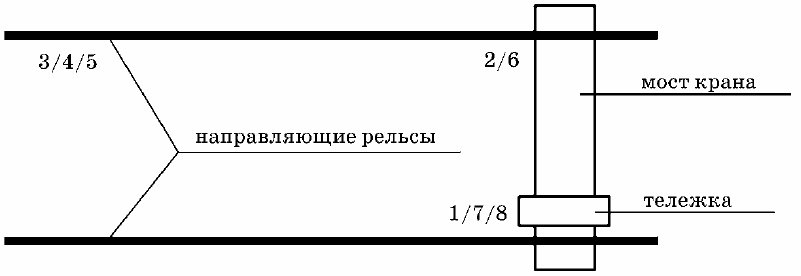
Riz. 1. Schéma d'exécution des opérations avec un pont roulant dans un cycle de travail
Ce cycle comprend les opérations suivantes (dans la Figure 1, les numéros d'opération sont indiqués en chiffres) :
1 — soulever la charge ;
2 — déplacer le chariot vers une position donnée ;
3 - déplacer la grue vers une position prédéterminée ;
4 — réduire le poids de la charge ;
5 - levage du crochet avec le poids de la charge ;
6 - déplacer la grue dans sa position d'origine ;
7 - déplacer le chariot dans sa position d'origine ;
8 — abaisser le crochet.
Comme on peut le voir sur le cycle de processus du pont roulant, le moteur d'entraînement du chariot est activé lors des deuxième et septième opérations. Lorsque le bogie s'approche d'une position donnée à distance du pont roulant, le moteur électrique de l'entraînement du bogie est freiné électriquement pour assurer la précision de freinage requise.
Le moteur est alors arrêté et un frein mécanique est appliqué. De plus, l'entraînement électrique du mouvement du pont est activé et la charge se déplace le long de l'atelier en fonction de la tâche technologique. En atteignant l'endroit désigné, la grue s'arrête, la charge est abaissée, puis les opérations technologiques nécessaires sont effectuées.

Le schéma cinématique du mécanisme de déplacement du chariot avec ponts roulants est illustré à la figure 2. Le mécanisme de déplacement du chariot est réalisé selon le schéma avec une boîte de vitesses au milieu entre les roues motrices.
L'entraînement du moteur électrique D via le disque de frein T, la boîte de vitesses P, les embrayages M et les arbres B est transmis aux roues de roulement. Une poulie de frein est utilisée pour maintenir le chariot immobile.
Le chariot a quatre roues de déplacement et deux roues motrices. Les roues de déplacement des chariots de grue sont généralement constituées de deux nervures.
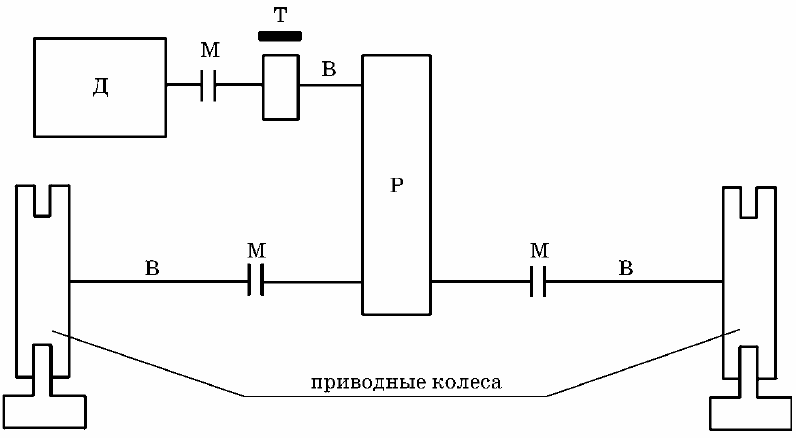
Riz. 2. Schéma cinématique du mécanisme de déplacement du chariot
Le temps nécessaire pour déplacer le chariot vers la position spécifiée sera déterminé en tenant compte du temps nécessaire pour accélérer et décélérer le chariot avec l'accélération requise.Sur la base des conditions du processus technologique, le tachygramme lors du déplacement du chariot doit avoir la forme illustrée à la figure 3.
Il est nécessaire d'assurer un démarrage en douceur du mécanisme de bogie à une vitesse donnée avec l'accélération requise. Pour assurer la précision de positionnement nécessaire, une décélération en douceur de l'entraînement électrique avec une transition vers une vitesse réduite est nécessaire, après quoi le chariot s'arrête.
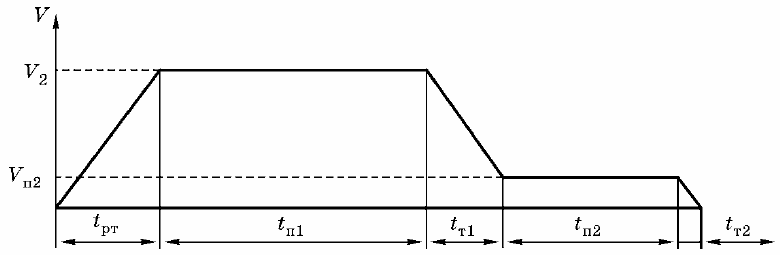
Riz. 3. Tachygramme du mécanisme de déplacement du chariot
Le mouvement du bogie avec chocs sur la structure métallique au niveau des articulations des rails, les accélérations et décélérations intenses, les vibrations naturelles de la structure métallique lors du chargement des engins provoquent des chocs mécaniques très intenses sur les équipements électriques situés sur le bogie du pont roulant. Sur cette base, l'entraînement électrique pour déplacer le chariot doit répondre aux exigences suivantes :
1) l'entraînement électrique doit permettre de démarrer le mécanisme en mouvement, d'inverser le sens du mouvement et d'arrêter le mécanisme avec l'accélération requise (m / s2) et la précision de positionnement correcte (mm);
2) l'entraînement électrique doit fournir un contrôle de vitesse en douceur depuis la conduite principale ;
3) le couple moteur développé doit assurer le fonctionnement du mécanisme à une intensité donnée ;
4) à un nombre donné de démarrages du moteur par heure, il ne devrait pas y avoir de surchauffe de ses enroulements, grâce à quoi un arrêt prolongé du mécanisme est possible;
5) le moteur doit être sélectionné en fonction des conditions de fonctionnement, c'est-à-dire qu'il doit avoir une conception appropriée et que ses enroulements doivent être résistants à la chaleur et isolés contre l'humidité;
6) le moteur d'entraînement doit avoir les plus petites masses de volant qui ont un impact significatif sur le flux des transitoires lors des démarrages fréquents de l'entraînement ;
7) le moteur d'entraînement doit correspondre à la puissance du mécanisme de fonctionnement et avoir la capacité de surcharge nécessaire ;
8) l'entraînement électrique doit assurer la formation de processus transitoires d'une durée minimale ;
9) la sécurité et la facilité d'entretien doivent être prises en compte lors de la conception de l'entraînement électrique.

Le moment statique des mécanismes de mouvement fonctionnant sur une ligne de voie horizontale dans une installation de production est créé par des forces de frottement de glissement dans les roulements et le frottement de roulement des roues de bogie roulant sur les rails du pont roulant. Le moment statique du mécanisme lors du mouvement vers l'avant du chariot est déterminé par la capacité de levage de la grue. Le moment statique du mécanisme lors du mouvement inverse du bogie est calculé pour une charge incomplète.
Pour l'entraînement électrique du chariot des ponts roulants, moteurs asynchrones à rotor à cage d'écureuil (y compris dans le cadre d'un variateur de fréquence), moteurs à induction à rotor bobiné et moteurs à courant continu à excitation indépendante.