Machines électriques à courant alternatif
Les machines électriques sont utilisées pour convertir l'énergie mécanique en énergie électrique (générateurs AC et DC) et inversement (moteurs électriques).
Dans tous ces cas, on utilise essentiellement trois découvertes principales dans le domaine de l'électromagnétisme : le phénomène d'interaction mécanique des courants découvert par Ampère en 1821, le phénomène d'induction électromagnétique découvert par Faraday en 1831, et le résumé théorique de ces phénomènes fait par Lenz (1834) dans sa loi bien connue de la direction du courant induit (en fait, la loi de Lenz a prédit la loi de conservation de l'énergie pour les processus électromagnétiques).

Pour convertir de l'énergie mécanique en énergie électrique ou inversement, il est nécessaire de créer un mouvement relatif d'un circuit conducteur avec un courant et un champ magnétique (aimant ou courant).
Dans les machines électriques conçues pour un fonctionnement continu, le mouvement de rotation de la partie mobile de la machine (le rotor de la machine à courant alternatif) située à l'intérieur de la partie fixe (le stator) est utilisé.La bobine de la machine qui sert à créer le champ magnétique s'appelle l'inducteur, et la bobine qui circule avec le courant de fonctionnement s'appelle l'induit. Ces deux derniers termes sont également utilisés pour les machines à courant continu.
Pour augmenter l'induction magnétique, les bobinages des machines sont placés sur des corps ferromagnétiques (acier, fonte).
Toutes les machines électriques ont la propriété de réversibilité, c'est-à-dire qu'elles peuvent être utilisées à la fois comme générateurs d'énergie électrique et comme moteurs électriques.

Moteurs asynchrones
Des moteurs asynchrones sont utilisés une des manifestations de l'induction électromagnétique… Dans les cours de physique, il est démontré comme suit :
Sous un disque de cuivre, pouvant tourner autour d'un axe vertical passant par son centre, est placé un aimant en fer à cheval vertical entraîné en rotation autour du même axe (l'interaction mécanique entre le disque et l'aimant est exclue). Dans ce cas, le disque commence à tourner dans le même sens que l'aimant, mais à une vitesse inférieure. Si vous augmentez la charge mécanique sur le disque (par exemple, en augmentant le frottement de l'axe contre le palier de butée), sa vitesse de rotation diminue.
La signification physique de ce phénomène s'explique aisément par la théorie de l'induction électromagnétique : lorsque l'aimant tourne, il se crée un champ magnétique tournant qui induit des courants de Foucault dans le disque, l'amplitude de ces derniers dépend, toutes choses égales par ailleurs, de la vitesse relative du champ et du disque .
Selon la loi de Lenz, le disque doit tourner dans le sens du champ. En l'absence de frottement, le disque doit acquérir une vitesse angulaire égale à la vitesse de l'aimant, après quoi la force électromotrice induite disparaîtra. Dans la vraie vie, les frottements sont inévitablement présents et le disque devient plus lent.Son amplitude dépend du moment de freinage mécanique subi par le disque.
L'écart entre la vitesse de rotation du disque (rotor) et la vitesse de rotation du champ magnétique se reflète dans le nom des moteurs.
Le principe de fonctionnement des moteurs asynchrones :
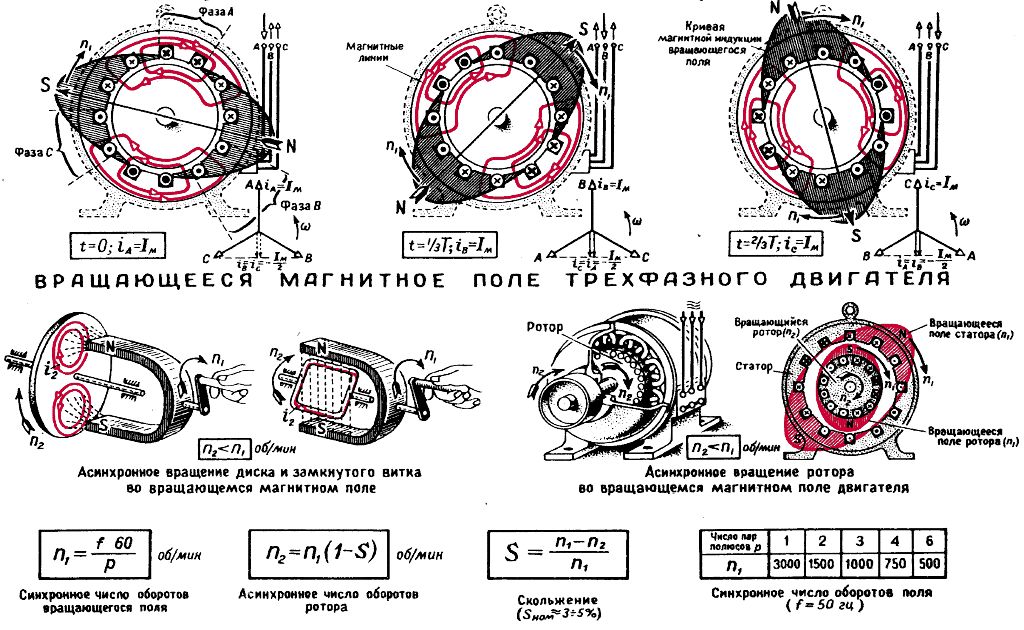
Dans les moteurs asynchrones techniques (le plus souvent triphasés), un champ magnétique tournant est créé courant polyphasécirculant autour de l'enroulement fixe du stator. A la fréquence du courant triphasé est et le nombre de bobines de stator 3p champ tournant fait n = f / p tours / sec.

Un rotor rotatif est situé dans la cavité du stator. Un mécanisme rotatif peut être relié à son arbre.Dans les moteurs "à cellule d'écureuil" les plus simples, le rotor est constitué d'un système de tiges métalliques longitudinales placées dans les rainures d'un corps cylindrique en acier. Les fils sont court-circuités par deux anneaux. Pour augmenter le couple, le rayon du rotor est suffisamment grand.
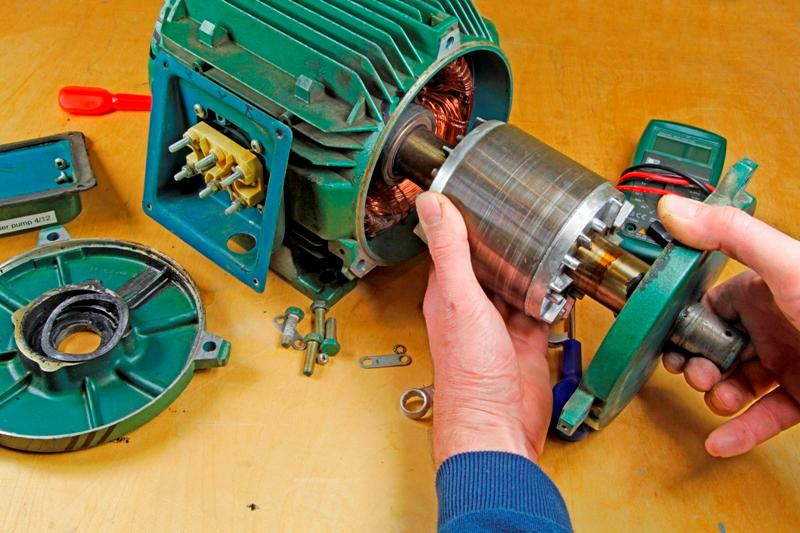
Dans d'autres conceptions de moteur (généralement des moteurs à haute puissance), les fils du rotor forment un enroulement triphasé ouvert. Les extrémités des bobines sont court-circuitées dans le rotor lui-même et les conducteurs sont amenés à trois bagues collectrices montées sur l'arbre du rotor et isolées de celui-ci.
Un rhéostat triphasé est connecté à ces anneaux à l'aide de contacts glissants (balais), qui sert à démarrer le moteur en mouvement. Une fois le moteur tourné, le rhéostat est complètement retiré et le rotor devient une cage d'écureuil (voir — Moteurs asynchrones à rotor bobiné).

Il y a une plaque à bornes sur le boîtier du stator. Les enroulements du stator leur sont apportés. Ils peuvent être inclus étoile ou triangle, en fonction de la tension secteur : dans le premier cas la tension secteur peut être 1,73 fois supérieure à la seconde.
La valeur caractérisant la décélération relative du rotor par rapport au champ statorique du moteur à induction est appelée glissement… Il passe de 100% (au moment du démarrage du moteur) à zéro (cas idéal du mouvement sans perte du rotor).
L'inversion du sens de rotation du moteur à induction est obtenue par commutation mutuelle de tous les deux conducteurs linéaires du réseau électrique alimentant le moteur.

Les moteurs à cage d'écureuil sont largement utilisés dans l'industrie. Les avantages des moteurs asynchrones sont la simplicité de conception et l'absence de contacts glissants.
Jusqu'à récemment, le principal inconvénient de ces moteurs était la difficulté de régulation de la vitesse, car si la tension du circuit du stator est modifiée pour cela, le couple change fortement, mais il était techniquement difficile de modifier la fréquence du courant d'alimentation. Les dispositifs à microprocesseur modernes sont maintenant largement utilisés pour contrôler la fréquence du courant d'alimentation afin de faire varier la vitesse des moteurs — convertisseurs de fréquence.
Alternateurs
Les alternateurs sont conçus pour une puissance importante et une haute tension. Comme les machines asynchrones, elles ont deux enroulements. Normalement, l'enroulement d'induit est situé dans le logement du stator. Les inducteurs qui créent le flux magnétique primaire sont montés sur le rotor et sont alimentés par un excitateur, un petit générateur de courant continu monté sur l'arbre du rotor. Dans les machines de forte puissance, l'excitation est parfois créée par une tension alternative redressée.
Du fait de l'immobilité du bobinage d'induit, les difficultés techniques liées à l'utilisation de contacts glissants à fortes puissances disparaissent.
La figure ci-dessous montre un schéma d'un générateur monophasé. Son rotor a huit pôles. Sur ceux-ci se trouvent des bobines enroulées (non représentées sur la figure) alimentées à partir d'une source externe par un courant continu appliqué à des bagues collectrices montées sur l'arbre du rotor. Les bobines polaires sont bobinées de manière à ce que les signes des pôles faisant face au stator alternent. Le nombre de pôles doit être pair.
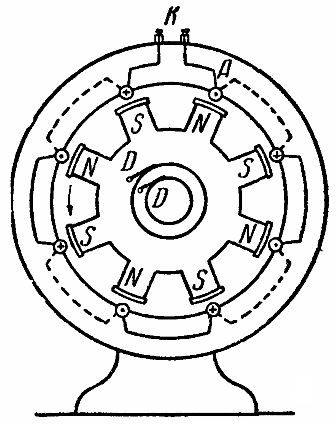
L'enroulement d'induit est situé dans le carter du stator. Ses longs fils «actifs» de travail, perpendiculaires au plan du dessin, sont représentés sur la figure par des cercles, ils sont traversés par les lignes d'induction magnétique lorsque le rotor tourne.
Les cercles montrent la distribution instantanée des directions des champs électriques induits. Les fils de connexion longeant la face avant du stator sont représentés par des lignes pleines et à l'arrière par des lignes pointillées. Les pinces K sont utilisées pour connecter un circuit externe à l'enroulement du stator. Le sens de rotation du rotor est indiqué par une flèche.
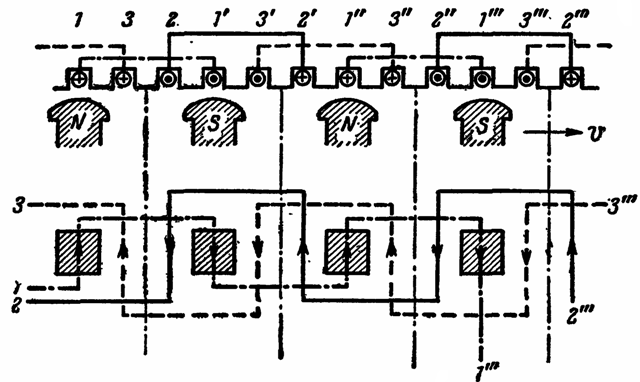
Si vous coupez mentalement la machine le long d'un rayon passant entre les pinces K et que vous la transformez en plan, la position relative de l'enroulement du stator et des pôles du rotor (côté et plan) sera représentée par un dessin schématique:
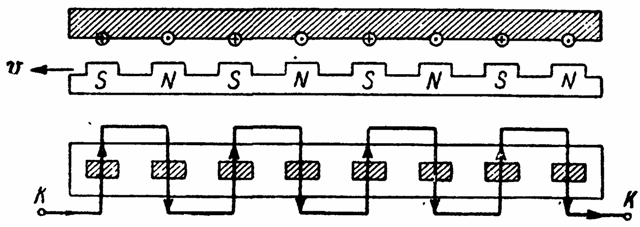
En considérant la figure, nous nous assurons que tous les fils actifs (passant par les pôles de l'inductance) sont connectés les uns aux autres en série et que la FEM induite en eux est additionnée. Les phases de tous les CEM sont évidemment les mêmes.Pendant une rotation complète du rotor, quatre périodes complètes de changement de courant seront obtenues dans chacun des fils (et donc dans le circuit extérieur).
Si une machine électrique a p paires de pôles et que le rotor tourne en faisant n tours par seconde, alors la fréquence du courant alternatif reçu par la machine est f = pn hz.
La fréquence de la FEM dans le réseau devant être constante, la vitesse de rotation des rotors doit être constante. Pour obtenir une FEM de fréquence technique (50 Hz), une rotation relativement lente peut être utilisée si le nombre de pôles du rotor est suffisamment grand.
Pour obtenir un courant triphasé, trois enroulements distincts sont placés dans le corps du stator. Chacun d'eux est décalé par rapport aux deux autres d'un tiers de la distance d'arc entre les pôles adjacents (opposés) des inducteurs.
Il est facile de vérifier que lorsque les inducteurs tournent, des champs électromagnétiques sont induits dans les bobines décalées en phase (dans le temps) de 120°. Les extrémités des bobines sont retirées de la machine et peuvent être connectées en étoile ou en triangle.
Dans un générateur, la vitesse relative du champ et du conducteur est déterminée par le diamètre du rotor, le nombre de tours du rotor par seconde et le nombre de paires de pôles.

Si le générateur est entraîné par un courant d'eau (hydrogénérateur), il est généralement réalisé avec des révolutions lentes. Pour obtenir la fréquence de courant souhaitée, il est nécessaire d'augmenter le nombre de pôles, ce qui nécessite à son tour une augmentation du diamètre du rotor.
Pour plusieurs raisons techniques puissants générateurs d'hydrogène ils ont généralement un arbre vertical et sont situés au-dessus de la turbine hydraulique, ce qui les fait tourner.

Générateurs entraînés par turbine à vapeur - Les générateurs à turbine sont généralement à grande vitesse. Afin de réduire les efforts mécaniques, ils ont de petits diamètres et un nombre de pôles par conséquent réduit.Un certain nombre de considérations techniques imposent la réalisation de turbogénérateurs à arbre horizontal.
Si le générateur est entraîné par un moteur à combustion interne, on parle de générateur diesel, car les moteurs diesel sont généralement utilisés comme moteurs consommant du carburant moins cher.

Réversibilité du générateur, moteurs synchrones
Si une tension alternative est appliquée à l'enroulement du stator du générateur à partir d'une source externe, il y aura alors une interaction des pôles de l'inducteur avec le champ magnétique du courant généré dans le stator, et des couples de la même direction agiront sur tous les pôles.
Si le rotor tourne à une vitesse telle que peu de temps après la moitié de la période du courant alternatif, le pôle suivant de l'inducteur (de signe opposé au premier pôle) ira sous le fil considéré de l'enroulement du stator, puis le signe du la force d'interaction entre elle et le courant , qui a changé de direction, restera la même.
Dans ces conditions, le rotor, étant sous l'influence continue du couple, continuera à se déplacer et pourra entraîner n'importe quel mécanisme. Surmonter la résistance au mouvement du rotor se produira en raison de l'énergie consommée par le réseau, et le générateur deviendra un moteur électrique.

Il convient de noter, cependant, qu'un mouvement continu n'est possible qu'à une vitesse de rotation strictement définie, car en cas d'écart par rapport à celle-ci, un moment d'accélération agira partiellement sur chacun des pôles du rotor, se déplaçant entre les deux conducteurs du stator, partie du temps - arrêt .
Ainsi, la vitesse de rotation du moteur doit être strictement déterminée, — le temps pendant lequel le pôle est remplacé par le suivant doit coïncider avec la demi-période du courant, c'est pourquoi de tels moteurs sont appelés de manière synchrone.
Si une tension alternative est appliquée à l'enroulement du stator avec un rotor fixe, alors, bien que tous les pôles du rotor pendant la première demi-période du courant subissent l'action de couples de même signe, toujours, en raison de l'inertie, le le rotor n'aura pas le temps de bouger. Au demi-cycle suivant, le signe des couples pour tous les pôles du rotor changera en sens inverse.
En conséquence, le rotor vibrera mais ne pourra pas tourner. Par conséquent, le moteur synchrone doit d'abord être enroulé, c'est-à-dire ramené au nombre de tours normal, et ensuite seulement le courant dans l'enroulement du stator doit être activé.
Le développement des moteurs synchrones est réalisé par des méthodes mécaniques (à faibles puissances) et des dispositifs électriques spéciaux (à fortes puissances).
Pour les petits changements de charge, la vitesse du moteur changera automatiquement pour s'adapter à la nouvelle charge. Ainsi, à mesure que la charge sur l'arbre du moteur augmente, le rotor ralentit immédiatement. Par conséquent, le déphasage entre la tension de ligne et la FEM induite opposée induite par l'inducteur dans l'enroulement du stator change.
De plus, la réaction d'induit crée une démagnétisation des inducteurs, de sorte que le courant du stator augmente, les inducteurs subissent un couple accru et le moteur recommence à tourner de manière synchrone, surmontant la charge accrue. Un processus similaire se produit avec la réduction de charge.
Avec de fortes fluctuations de la charge, cette adaptabilité du moteur peut être insuffisante, sa vitesse changera de manière significative, il "tombera du synchronisme" et finira par s'arrêter, tandis que l'induction EMF induite dans le stator disparaît et le courant dans celui-ci augmente nettement. Par conséquent, les fortes fluctuations de la charge doivent être évitées. Pour arrêter le moteur, il faut évidemment d'abord déconnecter le circuit du stator puis déconnecter les selfs ; lors du démarrage du moteur, vous devez respecter l'ordre inverse des opérations.
Les moteurs synchrones sont le plus souvent utilisés pour entraîner des mécanismes fonctionnant à vitesse constante. Voici les avantages et les inconvénients des moteurs synchrones et les méthodes de démarrage : Les moteurs synchrones et leurs applications
Bande de film pédagogique - "Moteurs synchrones", créée par l'usine d'aides pédagogiques-visuelles en 1966. Vous pouvez le visionner ici : Film fixe «Moteur synchrone»
