Types de moteurs asynchrones, variétés, quels sont les moteurs
Les moteurs à courant alternatif, qui utilisent le champ magnétique tournant du stator pour leur fonctionnement, sont actuellement des machines électriques très courantes. Ceux d'entre eux dans lesquels la vitesse du rotor diffère de la fréquence de rotation du champ magnétique du stator sont appelés moteurs asynchrones.

En raison de la grande capacité des systèmes énergétiques et de la grande longueur des réseaux électriques, l'alimentation en énergie des consommateurs s'effectue toujours en courant alternatif. Par conséquent, il est naturel de s'efforcer d'utiliser au maximum les moteurs électriques à courant alternatif. Cela, semble-t-il, vous libère de la nécessité de multiples conversions d'énergie.
Malheureusement, les moteurs à courant alternatif sont nettement inférieurs aux moteurs à courant continu en termes de propriétés et surtout de contrôlabilité, c'est pourquoi ils sont principalement utilisés dans des installations où le contrôle de la vitesse n'est pas nécessaire.
Systèmes à courant alternatif contrôlés relativement récemment avec connexion de moteurs à courant alternatif via convertisseurs de fréquence.
Un moteur à induction à cage d'écureuil est un transformateur tournant dont l'enroulement primaire est le stator et l'enroulement secondaire est le rotor. Il y a un entrefer entre le stator et le rotor. Comme dans tout vrai transformateur, chaque bobine possède également sa propre résistance.
Lorsque le moteur est connecté au secteur, un champ magnétique apparaît dans le stator, qui tourne de manière synchrone avec la fréquence du secteur. Du fait du phénomène d'induction électromagnétique sous l'action du champ magnétique statorique dans les enroulements rotoriques fermés électriquement, électricité.
Le courant électrique induit dans le rotor va créer son propre champ magnétique qui interagit avec le champ magnétique tournant du stator. En conséquence, le rotor commence à tourner et un moment mécanique proportionnel au courant du stator apparaît sur l'arbre du moteur.
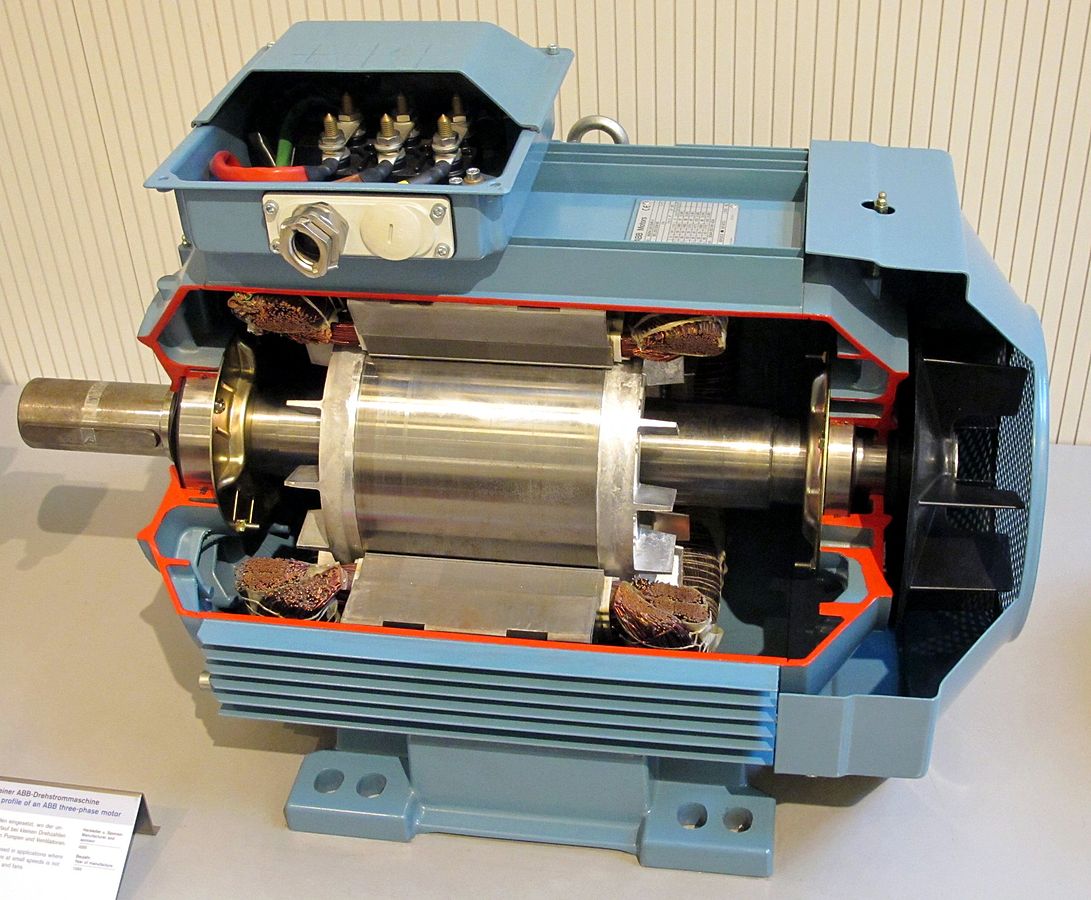
Modèle en coupe d'un moteur à induction triphasé
Une caractéristique d'un moteur asynchrone est qu'en raison de l'interaction des champs du stator et du rotor, la vitesse de rotation de l'arbre du moteur est légèrement inférieure à la fréquence du réseau d'alimentation. La différence entre la fréquence du réseau et la vitesse de rotation s'appelle glissement.
Les moteurs asynchrones sont largement utilisés dans divers secteurs de l'économie et de la production en raison de leur simplicité de fabrication et de leur grande fiabilité. Pendant ce temps, il existe quatre principaux types de moteurs à induction:
-
moteur asynchrone monophasé à cage d'écureuil ;
-
moteur à induction biphasé à cage d'écureuil ;
-
moteur asynchrone triphasé à cage d'écureuil ;
-
moteur asynchrone triphasé à rotor bobiné.

Un moteur à induction monophasé ne contient qu'un seul enroulement de stator de travail auquel un courant alternatif est fourni pendant que le moteur tourne.Mais pour démarrer le moteur, il y a un enroulement supplémentaire sur son stator, qui est brièvement connecté au réseau via un condensateur ou une inductance, ou il est court-circuité. Cela est nécessaire pour créer un déphasage initial afin que le rotor commence à tourner, sinon le champ magnétique pulsé du stator ne pousserait pas le rotor en place.
Le rotor d'un tel moteur, comme tout moteur à induction à rotor-écureuil, est un noyau cylindrique avec des canaux en aluminium moulé, avec des ailettes de ventilation co-moulées. Un tel rotor à cage d'écureuil est appelé rotor à cage d'écureuil. Les moteurs monophasés sont utilisés dans les applications à faible puissance telles que les ventilateurs de pièce ou les petites pompes.

Les moteurs à induction biphasés sont plus efficaces lorsqu'ils fonctionnent sur un réseau à courant alternatif monophasé. Ils contiennent deux enroulements de stator de travail situés perpendiculairement, et l'un des enroulements est connecté directement au réseau de courant alternatif, et le second via un condensateur de déphasage, de sorte qu'un champ magnétique rotatif est obtenu, et sans condensateur, le rotor lui-même sera ne bouge pas.
Ces moteurs ont également un rotor à cage d'écureuil et leur application est beaucoup plus large que celle du monophasé. Il y a maintenant des machines à laver et diverses machines. Les moteurs biphasés destinés à être alimentés par des réseaux monophasés sont appelés moteurs à condensateur, car le condensateur de déphasage en fait souvent partie intégrante.

Un moteur à induction triphasé contient trois enroulements de stator décalés les uns par rapport aux autres, de sorte que lorsqu'ils sont connectés à un réseau triphasé, leurs champs magnétiques sont déplacés dans l'espace les uns par rapport aux autres de 120 degrés.Lorsqu'un moteur triphasé est connecté à un réseau alternatif triphasé, un champ magnétique tournant est produit qui entraîne le rotor à cage.
Les enroulements du stator d'un moteur triphasé peuvent être connectés en étoile ou en triangle, et une tension plus élevée est nécessaire pour alimenter le moteur en étoile qu'en triangle, et donc deux tensions sont spécifiées sur le moteur par exemple : 127/ 220 ou 220/380. Les moteurs triphasés sont indispensables pour entraîner diverses machines à couper les métaux, treuils, scies circulaires, grues, etc.

Un moteur asynchrone triphasé avec un rotor de phase a un stator similaire aux types de moteurs décrits ci-dessus, un circuit magnétique feuilleté avec trois enroulements placés dans ses canaux, mais les tiges d'aluminium ne sont pas coulées dans le rotor de phase, et le complet - l'enroulement triphasé de phase est déjà posé connexion en étoile… Les extrémités en étoile de l'enroulement du rotor de phase sont dirigées vers trois bagues collectrices montées sur l'arbre du rotor et isolées électriquement de celui-ci.
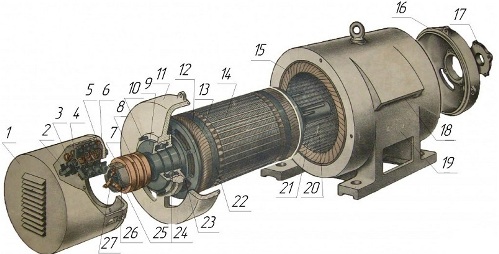
1 — boîtier avec grilles, 2 — balais, 3 — coup de balais avec porte-balais, 4 — goupille de fixation des balais, 5 — balais de câble, 6 — bloc, 7 — manchon isolant, 8 — bagues collectrices, 9 — couvercle de palier extérieur, 10 — goujon pour la fixation de la boîte et des chapeaux de palier, 11 — flasque arrière, 12 — bobine du rotor, 13 — support de bobine, 14 — noyau du rotor, 15 — bobine du rotor, 16 — flasque sur l'extrémité avant, 7 — couvercle de palier extérieur, 18 — évents, 19 — châssis, 20 — noyau de stator, 21 — goujons de couvercle de roulement intérieur, 22 — bandage, 23 — couvercle de roulement intérieur, 21 — roulement, 25 — arbre, 26 — bagues coulissantes, 27 — enroulements de rotor
Une tension alternative triphasée est fournie aux anneaux via des balais, et la connexion peut être établie à la fois directement et via des rhéostats. Bien sûr, les moteurs à moteurs rotatifs sont plus chers, mais les leurs Couple de démarrage sous charge est significativement plus élevé que celui des moteurs à cage d'écureuil. En raison de la puissance accrue et du couple de démarrage élevé, ce type de moteur a trouvé une application dans les entraînements d'ascenseurs et de grues, c'est-à-dire lorsque l'appareil est démarré sous charge et non au ralenti.
En savoir plus sur ce type de moteur ici: Moteurs électriques asynchrones à rotor bobiné
Voir également: Différences entre les moteurs à induction et les moteurs synchrones