Caractéristiques des moteurs à induction monophasés
Les moteurs asynchrones monophasés sont largement utilisés dans la technologie et la vie quotidienne. La production de moteurs électriques asynchrones monophasés d'une fraction de watt à des centaines de watts représente plus de la moitié de la production de toutes les machines de faible puissance, et leur puissance ne cesse d'augmenter.
Les moteurs monophasés sont généralement divisés en deux catégories :
-
les moteurs à usage général « qui comprennent les moteurs électriques industriels et domestiques ;
-
moteurs d'appareils automatiques - moteurs à courant alternatif contrôlés et non contrôlés et machines électriques spécialisées de faible puissance (génératrices tachymétriques, transformateurs rotatifs, selsins, etc.).
Une part importante des moteurs électriques asynchrones sont des moteurs à usage général conçus pour fonctionner sur un réseau alternatif monophasé. Cependant, il existe un groupe assez étendu de moteurs électriques asynchrones universels conçus pour fonctionner à la fois sur des réseaux monophasés et triphasés.
La conception des moteurs universels ne diffère pratiquement pas de conception traditionnelle des machines asynchrones triphasées… Lorsqu'ils fonctionnent sur un réseau triphasé, ces moteurs ont des caractéristiques similaires à celles des moteurs triphasés.
Les moteurs monophasés ont un rotor à cage d'écureuil et l'enroulement du stator peut être fabriqué en différentes versions. Le plus souvent, un bobinage de travail remplissant les deux tiers des encoches et un bobinage de démarrage remplissant le tiers restant des encoches sont placés sur le stator. La bobine de fonctionnement est calculée pour un fonctionnement continu et la bobine de démarrage est calculée uniquement pour la période de démarrage. Par conséquent, il est constitué de fil de faible section et contient un nombre important de spires. Pour créer un couple de démarrage, l'enroulement de démarrage comprend des éléments de déphasage - des résistances ou des condensateurs.
Les moteurs asynchrones de faible puissance peuvent être biphasés lorsque l'enroulement de travail placé sur le stator comporte deux phases mélangées dans l'espace à 90°. Dans l'une des phases, un élément de déphasage est constamment inclus - un condensateur ou une résistance Top, fournissant un certain déphasage entre les courants de bobine.
On l'appelle généralement un moteur avec un condensateur connecté en permanence à l'une des phases condensateur… La capacité du condensateur de déphasage peut être constante, mais dans certains cas, la valeur de la capacité peut être différente pour le démarrage et pour le mode de fonctionnement.
Une caractéristique des moteurs asynchrones monophasés est la possibilité de faire tourner le rotor dans différentes directions. Le sens de rotation est déterminé par le sens du couple initial.
A faible résistance rotorique (Ccr < 1), un moteur monophasé ne peut donc pas fonctionner en marche arrière. Le mode moteur correspond aux tours du rotor 0<n<nc à une vitesse supérieure le mode générateur a lieu.
Une caractéristique des moteurs monophasés est que leur couple maximal dépend de la résistance du rotor. Au fur et à mesure que la résistance active du rotor augmente, le couple maximal diminue et avec de grandes valeurs de résistance Skr > 1, il devient négatif.
Lors du choix du type de moteur électrique pour entraîner un appareil ou un mécanisme, il est nécessaire de connaître ses caractéristiques, les principales sont les caractéristiques de couple (couple de démarrage initial, couple maximal, couple minimal), la fréquence de rotation, les caractéristiques vibroacoustiques. Dans certains cas, des caractéristiques énergétiques et pondérales sont également requises.
A titre d'exemple, les caractéristiques d'un moteur monophasé sont calculées avec les paramètres suivants :
-
nombre de phases — 1;
-
fréquence du secteur — 50 Hz ;
-
tension secteur — 220 V ;
-
résistance active de l'enroulement du stator - 5 ohms;
-
résistance inductive de l'enroulement du stator - 9,42 Ohm;
-
résistance inductive de l'enroulement du rotor - 5,6 Ohm;
-
longueur axiale de la machine — 0,1 m;
-
le nombre de tours dans l'enroulement du stator -320 ;
-
rayon du trou du stator — 0,0382 m ;
-
nombre de canaux — 48 ;
-
entrefer — 1,0 x 103 m.
-
facteur d'inductance du rotor 1,036.
L'enroulement monophasé occupe les deux tiers des encoches du stator.
En figue. La figure 1 montre les dépendances du courant d'un moteur électrique monophasé et du couple de glissement électromagnétique. En mode ralenti idéal, le courant moteur consommé par le réseau, principalement pour créer un champ magnétique, a une valeur relativement importante.
Pour un moteur simulé, l'amplitude du courant magnétisant est d'environ 30% du courant initial, pour les moteurs triphasés de même puissance - 10-15%.Le moment électromagnétique dans le mode de ralenti idéal a une valeur négative, qui augmente à mesure que la résistance du circuit du rotor augmente. À glissement C= 1, le moment électromagnétique est nul, ce qui confirme le bon fonctionnement du modèle.
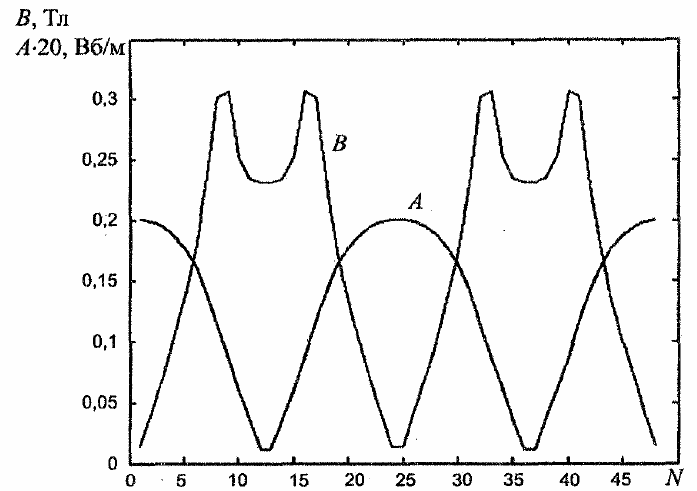
Figue. 1. Les enveloppes de potentiel vectoriel et d'induction magnétique dans l'entrefer du moteur lors du glissement s = 1
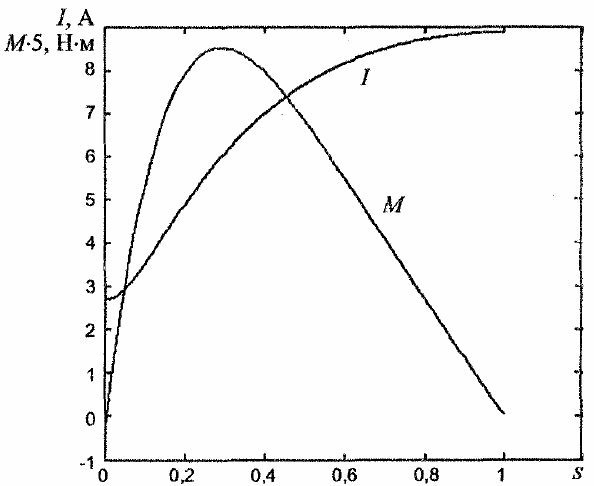
Riz. 2. Dépendance du courant et du couple électromagnétique d'un moteur asynchrone monophasé au glissement
Les dépendances de la puissance utile et consommée au glissement (Fig. 3) ont un caractère classique. Le rendement du moteur dans le mode ralenti idéal a un signe négatif correspondant au couple négatif, et le facteur de puissance dans ce mode est très faible (0,125 pour le moteur simulé).
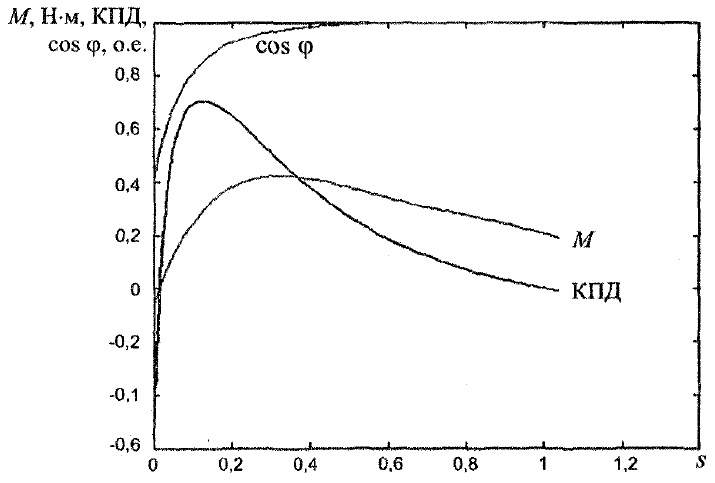
La valeur inférieure du facteur de puissance par rapport aux moteurs triphasés s'explique par l'amplitude élevée du courant magnétisant. Lorsque la charge augmente, la valeur du facteur de puissance augmente et devient comparable à celle des moteurs triphasés (Fig. 4).
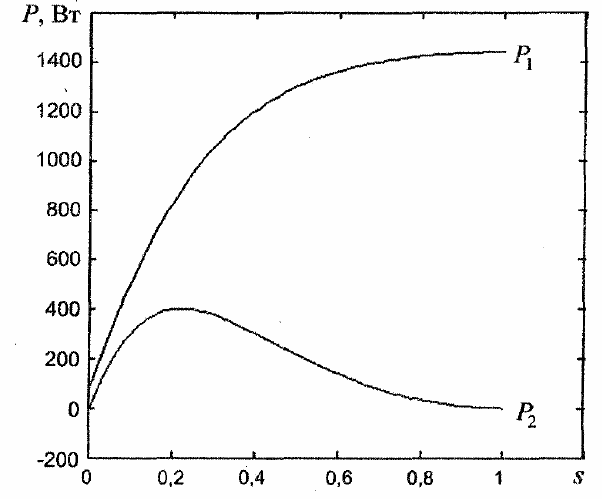
Riz. 3. Dépendance de la puissance utile et consommée d'un moteur asynchrone monophasé au glissement
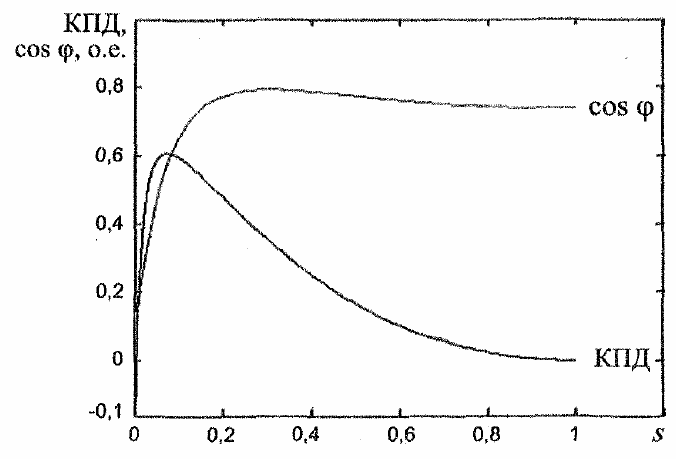
Riz. 4. Dépendance du coefficient d'action utile et de la puissance d'un moteur asynchrone monophasé au glissement
À mesure que la résistance active du rotor augmente, l'amplitude du moment électromagnétique diminue et, lors de glissements critiques au-dessus de l'unité, il devient négatif.
En figue. La figure 5 montre la dépendance du moment électromagnétique d'un moteur à glissement monophasé pour différentes valeurs de la conductivité électrique du milieu secondaire du moteur.
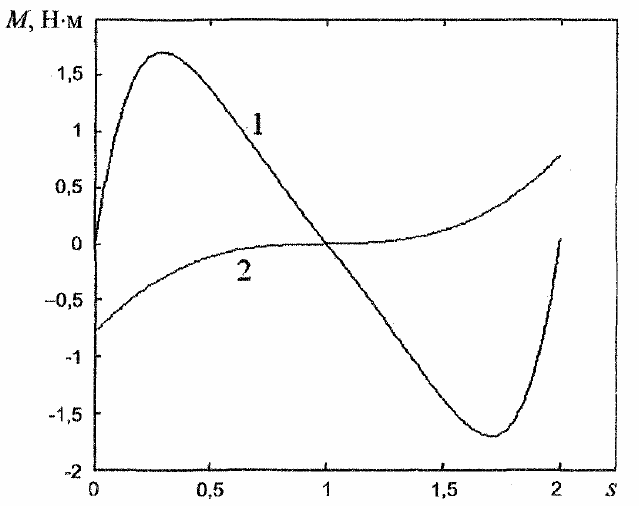
Riz. 5.Dépendance du moment électromagnétique d'un moteur à glissement monophasé à différentes résistances de rotor (1 - 17 x 106 Cm / m, 2 - 1,7 x 106 Cm / m)
Les moteurs à condensateur ont deux enroulements connectés en permanence au réseau. L'un d'eux est connecté directement au réseau, le second est connecté en série avec un condensateur qui fournit le déphasage nécessaire.
Les deux enroulements occupent le même nombre d'encoches sur le stator, et le nombre de leurs tours et la capacité du condensateur sont calculés de telle manière qu'avec un certain glissement, un champ magnétique rotatif circulaire est fourni. Le plus souvent, le bordereau nominal est accepté tel quel. Dans ce cas, cependant, le couple initial s'avère bien inférieur au couple nominal.
Le champ magnétique dans le mode initial est elliptique ; l'influence des composants antagonistes du champ magnétique est fortement affectée.Si la capacité du condensateur est augmentée en le sélectionnant dans la condition d'obtention d'un champ circulaire au démarrage, il y a alors une diminution du couple et un baisse des indicateurs énergétiques au glissement nominal.
Une troisième variante est également possible, lorsque le champ circulaire correspond à un glissement d'amplitude plus importante qu'en mode nominal. Mais ce chemin n'est pas non plus optimal, puisque l'augmentation du couple s'accompagne d'une augmentation significative des pertes. Une augmentation du couple de démarrage d'un moteur à condensateur peut être obtenue en augmentant la résistance active du rotor. Cette méthode entraîne une augmentation des pertes à chaque glissement, ce qui entraîne une diminution du rendement du moteur.
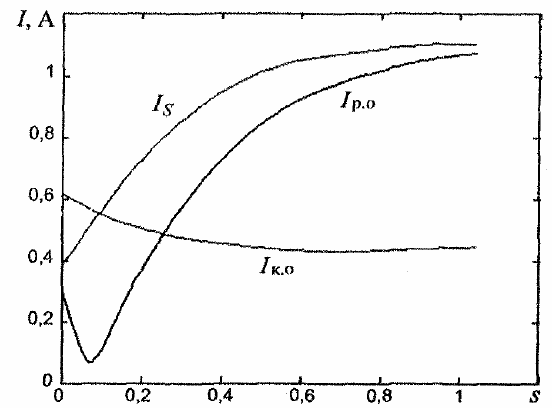
Riz. 6.Dépendance des courants du moteur du condensateur de glissement (Azp.o — courant de la bobine de fonctionnement, Azk.o — courant de la bobine du condensateur, E — courant du moteur)
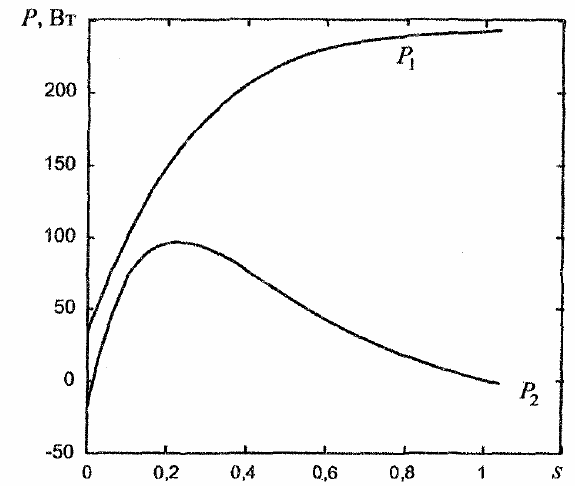
Riz. 7. Dépendance à la puissance de glissement P1 et P2 utile consommée d'un condensateur
Riz. 8. Dépendance du coefficient d'action et de puissance utiles et du moment électromagnétique du moteur à condensateur de glissement
Le moteur à condensateur présente des performances énergétiques tout à fait satisfaisantes, un facteur de puissance élevé, dont la valeur dépasse le facteur de puissance d'un moteur triphasé, et avec une résistance rotorique accrue et une capacité importante, un couple de démarrage élevé. Dans le même temps, comme mentionné ci-dessus, le moteur a une valeur d'efficacité réduite.
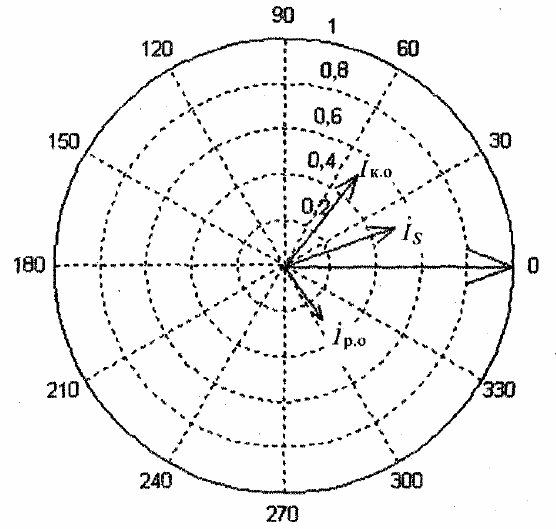
Riz. 9. Diagramme vectoriel d'un moteur à condensateur à glissement s = 0,1
Le diagramme vectoriel (Fig. 9) montre qu'à la valeur sélectionnée de la capacité du condensateur, le courant de la bobine du condensateur est en avance par rapport à la tension du réseau et le courant de la bobine de travail est en retard. Le diagramme montre également que lors d'un glissement proche de la valeur nominale, le champ magnétique du moteur est elliptique. Pour obtenir un champ circulaire, la valeur de la capacité du condensateur doit être réduite afin que les courants dans les deux bobines soient égaux en amplitude.
Voir aussi sur ce sujet :Moteurs à condensateur monophasés multi-vitesses