Moteurs à courant continu sans balais modernes
Grâce aux progrès significatifs de l'électronique des semi-conducteurs et à la technologie permettant de créer de puissants aimants au néodyme, les moteurs à courant continu sans balais sont largement utilisés aujourd'hui. Ils sont utilisés dans les machines à laver, les aspirateurs, les ventilateurs, les drones, etc.
Et bien que l'idée du principe de fonctionnement d'un moteur sans balais ait été exprimée dès le début du 19e siècle, elle a attendu dans les coulisses jusqu'au début de l'ère des semi-conducteurs, lorsque les technologies sont devenues prêtes pour la mise en œuvre pratique de ce concept intéressant et efficace, qui permettait aux moteurs à courant continu sans balais de marcher aussi largement qu'ils le font aujourd'hui. …
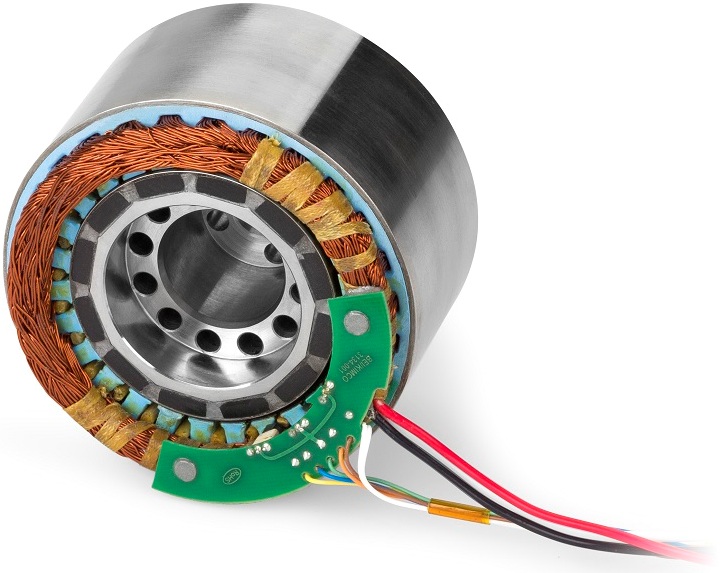
Dans la version anglaise, ils sont appelés moteurs de ce type Moteur BLDC — Moteurs CC sans balais — moteur à courant continu sans balais. Le rotor du moteur contient aimants permanents, et les enroulements de travail sont situés sur le stator, c'est-à-dire que le dispositif moteur BLDC est complètement opposé à ce qu'il y a dans le moteur à balais classique. Le moteur BLDC est contrôlé par un contrôleur électronique appelé ESC - Contrôleur de vitesse électronique — régulateur de vitesse électronique.
Régulateur électronique et haut rendement
Le régulateur électronique permet de faire varier en douceur l'énergie électrique fournie au moteur brushless. Contrairement aux versions plus simples des régulateurs de vitesse résistifs, qui limitent simplement la puissance en connectant une charge résistive en série avec le moteur, qui convertit l'excès de puissance en chaleur, le contrôle électronique de la vitesse offre une efficacité nettement supérieure sans gaspiller l'énergie électrique délivrée pour un chauffage inutile. ..
Le moteur CC sans balais peut être classé comme moteur synchrone auto-synchronisant, où un nœud étincelant nécessitant une maintenance régulière est complètement éteint — collectionneur… La fonction du collecteur est prise en charge par l'électronique, grâce à quoi toute la conception du produit est grandement simplifiée et devient plus compacte.
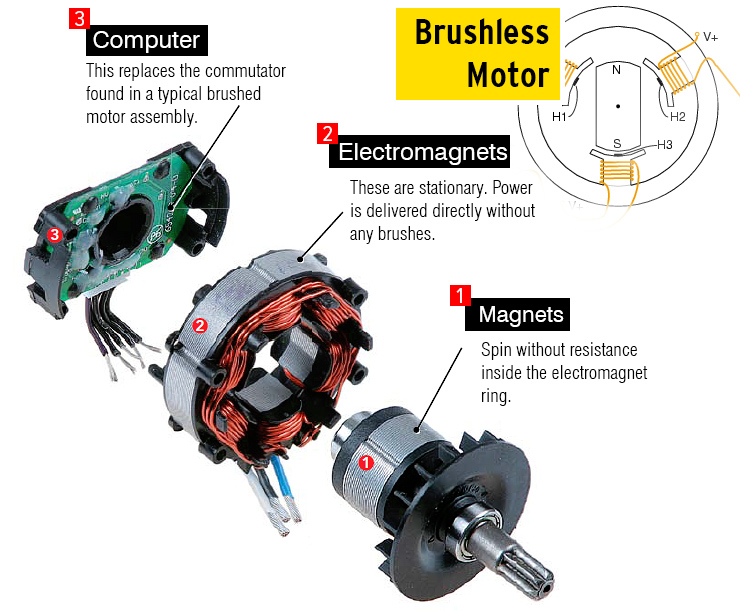
Les balais sont en effet remplacés par des interrupteurs électroniques dont les pertes sont bien moindres qu'avec une commutation mécanique. De puissants aimants en néodyme sur le rotor permettent un plus grand couple sur l'arbre. Et un tel moteur chauffe moins que son prédécesseur collecteur.
En conséquence, l'efficacité du moteur est la meilleure et la puissance par kilogramme de poids est plus élevée, plus une plage assez large de régulation de la vitesse du rotor et une absence presque complète d'interférences radio générées. Structurellement, les moteurs de ce type sont facilement adaptés pour fonctionner dans l'eau et dans des environnements agressifs.
L'unité de commande électronique est une partie très importante et coûteuse d'un moteur à courant continu sans balais, mais on ne peut pas s'en passer.De ce dispositif, le moteur reçoit une puissance dont les paramètres affectent simultanément à la fois la vitesse et la puissance que le moteur pourra développer sous charge.
Même si la vitesse de rotation n'a pas besoin d'être ajustée, une unité de commande électronique est toujours nécessaire, car elle porte non seulement la fonction de commande, mais possède également un composant d'alimentation. On peut dire que ESC est un analogue de régulateur de fréquence pour moteurs asynchrones à courant alternatifspécialement conçu pour alimenter et contrôler un moteur à courant continu sans balais.
Contrôle moteur BLDC
Pour comprendre comment un moteur BLDC est contrôlé, rappelons d'abord comment fonctionne un moteur à collecteur. En son coeur le principe de rotation du cadre avec un courant dans un champ magnétique.
Chaque fois que le cadre avec le courant tourne et trouve une position d'équilibre, le commutateur (les balais pressés contre le collecteur) change la direction du courant à travers le cadre et le cadre continue. Ce processus est répété lorsque le cadre se déplace d'un pôle à l'autre. Ce n'est que dans le moteur du collecteur qu'il existe de nombreux cadres de ce type et qu'il existe plusieurs paires de pôles magnétiques, c'est pourquoi le collecteur à balais ne contient pas deux contacts, mais plusieurs.
ECM fait de même. Il inverse la polarité du champ magnétique dès que le rotor doit s'éloigner de la position d'équilibre. Seule la tension de commande n'est pas fournie au rotor, mais aux enroulements du stator, et cela se fait à l'aide de commutateurs à semi-conducteurs au bon moment (phases du rotor).
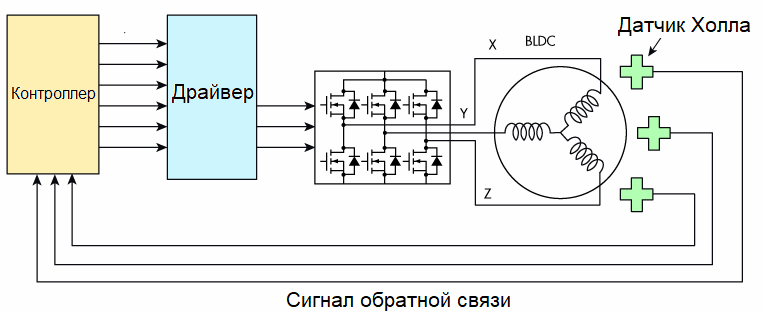
Il est évident que le courant vers les enroulements du stator d'un moteur sans balai doit être fourni au bon moment, c'est-à-dire lorsque le rotor se trouve dans une certaine position connue. Pour ce faire, utilisez l'une des méthodes suivantes.Le premier est basé sur le capteur de position du rotor, le second est en mesurant l'EMF de l'une des bobines qui ne reçoit pas actuellement d'alimentation.
Les capteurs sont différents, magnétiques et optiques, les plus populaires sont les capteurs magnétiques effet Hall… La deuxième méthode (basée sur la mesure de la FEM), bien qu'efficace, ne permet pas un contrôle précis à bas régime et au démarrage. Les capteurs à effet Hall, quant à eux, offrent un contrôle plus précis dans tous les modes. Il existe trois capteurs de ce type dans les moteurs BLDC triphasés.
Les moteurs sans capteurs de position du rotor sont applicables dans les cas où le moteur démarre sans charge sur l'arbre (ventilateur, hélice, etc.). Si le démarrage se fait sous charge, un moteur avec des capteurs de position du rotor est nécessaire. Les deux options ont leurs avantages et leurs inconvénients.
Une solution avec un capteur se transforme en une commande plus pratique, mais si au moins l'un des capteurs tombe en panne, le moteur devra être démonté, de plus, les capteurs nécessitent des fils séparés. Dans la version sans capteur, aucun fil spécial n'est nécessaire, mais lors du démarrage, le rotor oscille d'avant en arrière. Si cela est inacceptable, il est nécessaire d'installer des capteurs dans le système.
Rotor et stator, nombre de phases
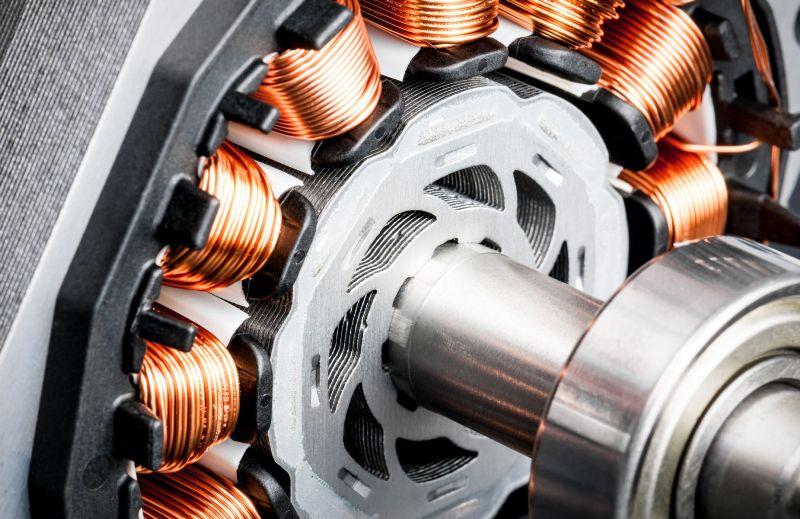
Le rotor d'un moteur BLDC peut être externe ou interne et le stator interne ou externe respectivement. Le stator est en matériau magnétiquement conducteur, le nombre de dents étant complètement divisé par le nombre de phases. Le rotor peut être fait, pas nécessairement d'un matériau magnétiquement conducteur, mais nécessairement avec des aimants solidement attachés à celui-ci.

Plus les aimants sont puissants, plus le couple disponible est important. Le nombre de dents du stator ne doit pas être égal au nombre d'aimants du rotor.Le nombre minimum de dents est égal au nombre de phases de commande.
La plupart des moteurs CC sans balais modernes sont triphasés, simplement pour simplifier la conception et le contrôle. Comme dans les moteurs à induction à courant alternatif, les enroulements des trois phases sont ici reliés au stator par un "triangle" ou une "étoile".
De tels moteurs sans capteurs de position du rotor ont 3 fils d'alimentation, et les moteurs avec capteurs ont 8 fils : deux fils supplémentaires pour alimenter les capteurs et trois pour les sorties de signal des capteurs.
Les moteurs à rotor externe basse vitesse sont réalisés avec un grand nombre de pôles (et donc de dents) par phase pour obtenir une rotation avec une pulsation nettement inférieure à la fréquence du courant de commande. Mais même avec des moteurs triphasés à grande vitesse, le nombre de dents inférieur à 9 n'est généralement pas utilisé.