L'utilisation de moteurs à induction à rotor bobiné dans le cadre d'un variateur de fréquence
 Lors de la mise à niveau des entraînements électriques de grue, afin de réduire les coûts, il est rationnel d'utiliser des moteurs asynchrones de grue existants et en état de marche. La majorité des robinets domestiques sont généralement équipés de moteurs à rotor à phase des séries MT et 4MT.
Lors de la mise à niveau des entraînements électriques de grue, afin de réduire les coûts, il est rationnel d'utiliser des moteurs asynchrones de grue existants et en état de marche. La majorité des robinets domestiques sont généralement équipés de moteurs à rotor à phase des séries MT et 4MT.
La possibilité d'utiliser des moteurs asynchrones de grue avec un rotor à verrouillage de phase dans le cadre d'un entraînement électrique à fréquence contrôlée est intéressante. Actuellement, LLC «Cranpriborservice» a une expérience positive dans le fonctionnement de moteurs asynchrones d'une puissance allant jusqu'à 55 kW avec un rotor de phase en court-circuit lorsqu'ils sont alimentés par des convertisseurs de fréquence.
Une telle solution technique a été apportée lors de la modernisation de grues précédemment équipées de systèmes d'entraînement de grue traditionnels basés sur un moteur asynchrone à rotor phasé.Afin de réduire le coût d'une telle mise à niveau, des moteurs électriques ont été économisés et, dans certains cas, des résistances de ballast qui, après vérification des calculs et modification du schéma de connexion, ont été utilisées comme résistances de freinage.
D'un point de vue énergétique, les moteurs électriques à rotor bobiné des séries MT et 4MT sont encore plus préférables que les moteurs électriques à cage d'écureuil de la même série, car ils ont une résistance active inférieure de l'enroulement du rotor et, par conséquent, des pertes plus faibles dans le cuivre du rotor en équilibre.
Un moteur électrique à rotor bobiné sélectionné pour fonctionner dans un système de grue traditionnel avec un entraînement électrique à régulation par rhéostat, lors du passage à l'alimentation d'un convertisseur de fréquence (si le mode de fonctionnement du mécanisme n'est pas dépassé) a toujours un niveau de démarrage inférieur- jusqu'à des pertes.
Dans la plupart des cas, des mises à niveau de la grue sont effectuées pour étendre la plage de contrôle de la vitesse pour des opérations d'assemblage précises ou lors du transfert de la grue au sol. Dans ce cas, le mode de fonctionnement de la grue est généralement inférieur à celui établi lors de sa fabrication. Avec le contrôle vectoriel, les pertes en régime permanent sont également réduites, car la consommation d'énergie dans l'entraînement électrique est optimisée à charge partielle.

Il y a une opinion que les impulsions de tension à modulation de largeur d'impulsionappliquée aux bobinages du moteur entraîne un vieillissement accéléré de l'isolation. Dans ce cas, l'utilisation de "moteurs électriques spéciaux pour le fonctionnement dans le cadre d'entraînements à fréquence variable" est recommandée.Il est vrai que la classe d'isolation de ces moteurs électriques ne diffère pas de la classe d'isolation des moteurs électriques domestiques des séries MT et 4MT. Plus de dix ans d'exploitation de moteurs électriques à rotor phasé à anneaux court-circuités dans le cadre d'un variateur de fréquence ont démontré leur grande fiabilité.
Une caractéristique de la conception des moteurs à rotor de phase est la présence de bagues collectrices et de balais. Par conséquent, un circuit ouvert de l'une des phases du rotor de tels robinets en raison de l'usure des balais ou d'un endommagement du porte-balais semble très probable.
Afin d'établir l'opérabilité de l'entraînement électrique en cas de perte de phase du rotor, une expérimentation a été réalisée sur le stand de Cranpriborservice LLC avec un entraînement électrique du mécanisme de levage avec un convertisseur de fréquence de type Altivar 71 et un moteur de 55 kW. La loi de commande du moteur électrique est vectorielle Avant de lever une charge nominale "du poids", l'une des phases en court-circuit du rotor du moteur de 55 kW a été déconnectée.
L'entraînement électrique a ensuite été activé dans le sens de la montée à une fréquence de 25 Hz. Dans le même temps, l'entraînement électrique accélère dans le sens de la montée, mais des fluctuations de vitesse sont perceptibles.
En figue. La figure 1 montre les oscillogrammes expérimentaux de la vitesse d'entraînement électrique avec le rotor en court-circuit et lorsqu'une des phases du rotor est déconnectée.
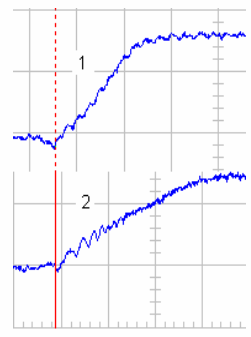
Riz. 1. Oscillogrammes expérimentaux de la vitesse de l'entraînement électrique lors de la levée de la charge nominale 0-3P : les anneaux à 1 rotor sont court-circuités ; 2. une des phases du rotor est déconnectée.
D'après les oscillogrammes, on peut voir que l'accélération de l'entraînement électrique dans le sens de la montée avec une phase interrompue dans le rotor dure environ 1,5 fois plus longtemps qu'avec des anneaux entièrement raccourcis. Cependant, du point de vue de la protection contre les chutes de charges, un tel régime est acceptable.
Il convient également de noter que le courant stator mesuré par le convertisseur lors de la perte de phase ne diffère pas du courant en mode symétrique, bien que théoriquement sa valeur devrait être plus élevée. La protection thermique du moteur électrique est basée sur le calcul de I2t, donc son fonctionnement dans ce mode n'aura pas lieu.
Ainsi, la perte de phase dans le rotor peut ne pas être remarquée par le personnel de service et le moteur peut être endommagé par une surchauffe. Comme protection contre un tel mode, on peut proposer l'inclusion d'un relais thermique dans le circuit stator ou rotor, mais cette solution nécessite une vérification expérimentale.