La sélection d'un moteur électrique asynchrone pour un fonctionnement en mode de freinage dynamique par auto-excitation
 Moteur électrique asynchrone avec un rotor bobiné avec le schéma de contrôle le plus simple - l'inclusion d'une résistance dans le circuit du rotor a des propriétés de contrôle extrêmement faibles. Par conséquent, avant la disponibilité des convertisseurs de fréquence sur le marché, divers schémas ont été développés pour obtenir une vitesse réduite en mode abaisseur.
Moteur électrique asynchrone avec un rotor bobiné avec le schéma de contrôle le plus simple - l'inclusion d'une résistance dans le circuit du rotor a des propriétés de contrôle extrêmement faibles. Par conséquent, avant la disponibilité des convertisseurs de fréquence sur le marché, divers schémas ont été développés pour obtenir une vitesse réduite en mode abaisseur.
En fait, il n'y en a pas beaucoup. À l'étranger, l'utilisation d'une machine électrique supplémentaire - un frein vortex monté sur le même arbre que le moteur principal - s'est généralisée. Le schéma vous permet d'obtenir des caractéristiques mécaniques suffisamment rigides lors de l'abaissement de la charge, mais un tel entraînement électrique a des caractéristiques énergétiques extrêmement faibles (l'énergie de freinage est libérée dans le frein vortex). De plus, le frein vortex a un coût assez élevé et complique grandement l'agencement de la partie mécanique.
Par conséquent, afin d'obtenir la vitesse d'atterrissage dans les mécanismes de levage basés sur un moteur asynchrone à rotor à phases à l'usine Dynamo à la fin des années 1970, une équipe de conception dirigée par E.M. Pevzner a introduit le freinage dynamique auto-excité.
Un tel entraînement électrique est largement utilisé dans les grues domestiques (panneaux de type TSD, TSDI, KSDB pour ponts roulants, portiques et portiques, panneaux de commande pour grues à tour KB-309, KB-403, KB-404, KB-405, KB - 406, KB-408, KB-415, KB-415-07, KB-473, KBM-401P.). Ainsi, on parle de dizaines de milliers de grues en opération.
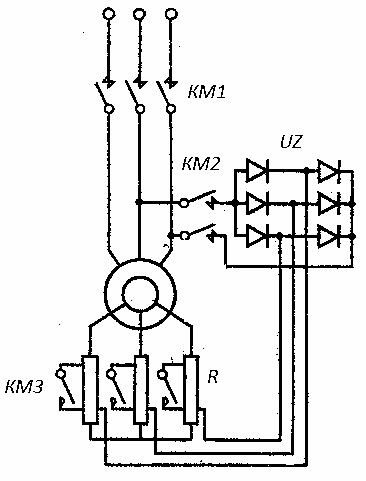
Riz. 1. Schéma d'inclusion d'un moteur asynchrone en mode freinage dynamique par auto-excitation
Le principe du freinage dynamique avec auto-excitation est le suivant :
Le circuit du rotor comprend redresseur triphasé UZ (Fig. 1). Le moteur électrique est déconnecté du réseau via le contacteur KM1. La tension redressée est connectée à l'enroulement du stator via le contacteur KM2. Les contacts du contacteur KM3 sont fermés. Lorsque le frein est desserré (non représenté sur le schéma), l'arbre du moteur commence à tourner sous l'action de la masse qui tombe.
Une FEM est induite dans l'enroulement du rotor, sous l'influence de laquelle un courant commence à circuler dans le circuit rotor-stator. Le moteur développe le couple de freinage, la charge est abaissée à vitesse constante. La valeur de vitesse est déterminée par la valeur de résistance du circuit du rotor. Plus la résistance est grande, plus le taux de descente est rapide. Pour augmenter la vitesse, le contacteur KM3 est désactivé.
En mode de freinage dynamique à auto-excitation, la motorisation électrique ne consomme de l'énergie du réseau que pour alimenter l'équipement poussoir hydraulique de frein et contacteur-relais. A titre d'exemple, la Fig. La figure 7 montre les caractéristiques mécaniques d'un entraînement électrique avec un panneau TSD.
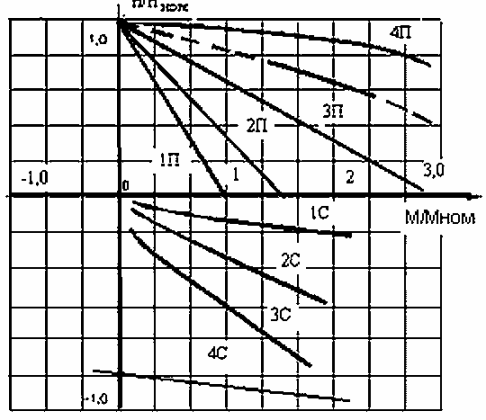
Riz. 2. Caractéristiques mécaniques de l'entraînement électrique du mécanisme de levage avec le panneau TSD
Les caractéristiques de freinage dynamique sont désignées par 1C, 2C, 3C. On peut voir que les caractéristiques ont une dureté suffisante. Le réglage de la vitesse s'effectue dans la plage 1: 8, ce qui dans la plupart des cas est suffisant pour les robinets de masse.
La condition d'auto-excitation du moteur électrique est :
Où x '2- résistance inductive de l'enroulement du rotor, Ohm; хо- résistance inductive du circuit magnétisant. Om
Où ks — coefficient du schéma
kd — coefficient de réduction du courant du rotor au courant du stator ; kcx — coefficient du circuit de correction, pour un circuit en pont triphasé kx = 0,85 ; kt est le coefficient de transformation du moteur du stator au rotor
Le coefficient kd dépend du schéma de connexion des enroulements du stator, qui sont connectés à une étoile dans les moteurs de robinet domestique à une tension secteur de 380 V.
Le coefficient kt dépend du coefficient de transformation, c'est-à-dire du rapport de la tension du stator à la tension du rotor, qui dépend du type de moteur. Par exemple, pour plusieurs moteurs électriques des séries MT et 4MT, la valeur et les paramètres associés sont tabulés. 1.
Tableau 1.
Puissance type moteur électrique, kWt Tension rotor, V kt x x '2 xho √(1 + 2x '2/ho) MTN412-6 30 255 1,5 1,3 0,173 3,74 1,04 4MTN225L6 55 290 1,31 1,31 0,197 3,73 1,05 MTN512 -6 55 340 1,11 0,98 0,197 3,8 1,05 4MTN280L10 75 308 1,23 1,06 0,146 2,33 1,06 4MTN280M6 110 420 0,9 0,7 0,083 2,98 1,02
La condition кс ≥ √(1 + 2х '2/хо) est réalisée pour les moteurs de type MTN412-6, 4MTN225L6, qui peuvent être appelés "excités". De tels moteurs électriques entrent dans le mode d'auto-excitation sans prendre de décisions de circuit supplémentaires. Cependant, dans les appareils complets basse tension (appareillage de commutation basse tension ou panneaux de commande) conçus pour fonctionner avec de tels moteurs, une petite excitation initiale est fournie pour un fonctionnement fiable.
L'excitation initiale s'effectue en faisant passer une constante, dite Une petite valeur de "courant d'alimentation" (généralement pas plus de 10% du courant nominal du moteur) d'un redresseur demi-onde. Pour les moteurs excités, dans tous les cas, cela est suffisant pour une transition fiable vers le mode de freinage dynamique auto-excité.
Les moteurs électriques MTN512-6, 4MTN280M6, pour lesquels la condition кс ≥ √(1 + 2х '2/хо) n'est pas satisfaite, sont "non excités". Cela ne signifie pas que de tels moteurs ne peuvent pas fonctionner en mode de freinage dynamique avec auto-excitation, mais la valeur du courant supplémentaire nécessaire pour eux atteint 50% du courant nominal du stator.Cela nécessite l'utilisation de NKU (panneaux de commande) spéciaux pour les moteurs électriques non excités. …
Le moteur électrique de type 4MTN280L10 avec кс = √(1 + 2х '2/хо) est à la limite de l'auto-excitation et tout changement aléatoire des paramètres peut violer la condition d'auto-excitation. Par conséquent, un tel moteur peut également être classé comme non excitable.
Le principal paramètre affectant la capacité du moteur électrique à s'auto-exciter est la tension nominale du rotor E2nom. La valeur critique de E2nom, à laquelle l'auto-excitation ne se produit pas sans un courant d'alimentation important, doit être prise égale à 300 V.
Cette caractéristique du mode de freinage dynamique à auto-excitation a été prise en compte par l'usine Dynamo et Sibelektromotor PO lors du développement d'une série de moteurs électriques de grue 4MT au début des années 1980.
En particulier, la valeur E2nom de certains moteurs électriques a été réduite par rapport à la série MT précédente pour rendre les moteurs excitables.
Par exemple, pour le moteur électrique 4MTN225L6, largement utilisé dans l'entraînement électrique des grues à tour, E2nom a été réduit par rapport au précédent moteur de la série MTN512-6 de 340 à 290 V, ce qui a rendu le moteur auto-excité. Plus tard, OJSC "Sibelelectromotor" a commencé la production du moteur électrique 4MTM225L6 avec les mêmes paramètres.
Au fil du temps, des moteurs électriques ayant un objectif similaire ont commencé à être produits par d'autres fabricants.
L'usine de construction de grues Rzhevsky produit le moteur électrique MKAF225L6, la société électrotechnique sibérienne produit le moteur électrique 4MTM225L6 PND.Malgré l'aspect différent du prototype lié aux capacités technologiques de chacun des constructeurs, tous ces moteurs électriques ont les mêmes paramètres électriques et dimensions d'installation et sont complètement interchangeables.
La différence dans les noms des moteurs permet à l'utilisateur de faire un choix éclairé de l'un ou l'autre constructeur, guidé par ses propres préférences, prix, délai de livraison, etc. Et en même temps, soyez absolument sûr que le remplacement d'un moteur électrique d'un fabricant de robinets par un moteur électrique d'un autre fabricant n'entraînera pas un dysfonctionnement du robinet ou un accident.
Cependant, au cours de la dernière décennie, des moteurs électriques de divers fabricants sont apparus sur le marché intérieur, dont la marque reproduit exactement la marque du moteur électrique "original" produit par JSC "Sibelelectromotor". On peut supposer que l'origine des moteurs électriques est liée au grand voisin oriental de notre pays. Leur prix est légèrement inférieur à celui des fabricants traditionnels, de sorte que l'intérêt pour eux des approvisionnements des entreprises est compréhensible.
Ainsi, en commandant un moteur électrique à installer sur une grue fabriquée ou en remplaçant un moteur électrique endommagé sur une grue par un moteur fonctionnel, vous pouvez obtenir un moteur électrique d'un fabricant inconnu, avec un E2nom différent du moteur électrique prototype.
La situation rappelle un peu le début des années 90, lorsque plusieurs groupes pop du même nom tournaient en même temps dans le pays.
Rappelons encore une fois que le rapport E2nom / I2nom est le paramètre le plus important d'un moteur à rotor bobiné, influant sur le choix des résistances de démarrage, de l'équipement relais-contacteur et, comme mentionné ci-dessus, sur la condition d'auto-excitation du moteur électrique.
Souvent, cependant, il n'y a aucune donnée de rotor sur les plaques signalétiques des moteurs clonés. Voici un exemple:
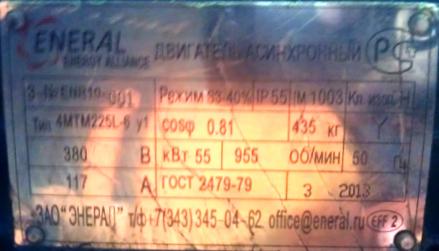
Riz. 3. Plaque signalétique du moteur asynchrone de la grue à rotor
Soit dit en passant, ce moteur électrique avait la valeur «correcte» E2nom, seulement maintenant il fallait la déterminer empiriquement.
Dans les catalogues d'autres fabricants pour le moteur électrique 4MTM225L6, la valeur E2nom = 340 V est indiquée, c'est-à-dire le moteur excité devenait un moteur non excité. L'utilisation d'un tel moteur électrique dans le cadre d'une motorisation électrique à freinage dynamique avec auto-excitation a pour conséquence une chute de charge et un décollement du moteur électrique avec destruction mécanique des bobinages rotor et stator.
C'est exactement cette image que l'auteur a observée récemment dans l'une des plus anciennes entreprises de construction de machines russes, où un nouveau pont roulant avec un moteur électrique cloné de type 4MTM225L6 avec E2n = 340 V a été livré. souffrir. De plus, le propriétaire de la grue restaure le moteur trois (!) fois après avoir esquivé.
Un autre fabricant de moteurs électriques clones, qui a apparemment connu à plusieurs reprises des accidents similaires, produit désormais deux moteurs électriques sous la même marque (!). L'un avec E2nom = 340 V, l'autre avec E2nom = 264 V est indiqué dans le catalogue avec la mention : "pour robinets type KB", c'est-à-dire grues à tour.
Un tel moteur est en effet le plus utilisé sur les grues à tour, mais il est également installé sur les ponts roulants. Ainsi, vous pouvez entendre le dialogue entre le fournisseur et le client : « Pour quelle grue avez-vous besoin d'un moteur ? Pour le parquet. Prenez alors celui-ci (E2nom = 340 V). » Et dans l'entraînement des palans électriques, il y a un panneau de commande avec freinage dynamique auto-excité. Le résultat est décrit ci-dessus.
En même temps, personne ne dit que ces moteurs électriques sont défectueux ou peu fiables et ne peuvent pas être utilisés sur des grues. Plus il y a de choix sur le marché, mieux c'est. Comme on dit, il y a plus de moteurs bons et différents. C'est juste que leur marque induit le consommateur en erreur, ce qui peut être lourd de conséquences dangereuses.
Pour utiliser un moteur électrique avec des paramètres de rotor autres que le prototype, il faut :
-
Mesurez E2nom lorsque le circuit du rotor est ouvert et que l'enroulement du stator est connecté au réseau ;
-
Sur la base des mesures E2nom, calculer, sélectionner et commander des résistances de ballast ;
-
Choisissez un tableau de commande pour moteurs électriques sans excitation dans le catalogue et commandez-le.
Ou vous pouvez simplement vous renseigner sur la valeur d'E2nom avant de commander un moteur qui attire avec son prix et convenir spécifiquement de cela dans le contrat. Cependant, cela n'empêche pas la mesure de E2nom lors de la commande d'entrée du moteur commandé.
En résumant ce qui précède, nous pouvons tirer les conclusions suivantes :
-
Dans l'entraînement électrique des robinets domestiques basés sur des moteurs électriques à rotor de phase, le freinage dynamique auto-excité est largement utilisé. Des dizaines de milliers de ces entraînements électriques sont en service. Ils sont toujours en cours d'émission.
-
Pour fonctionner en freinage dynamique auto-excité, le moteur électrique doit avoir un certain rapport E2nom / I2nom.
-
La condition principale pour l'auto-excitation d'un moteur électrique à rotor bobiné est la valeur de E2nom ≤ 300 V.
-
L'utilisation de moteurs électriques avec E2nom> 300 V avec des panneaux de commande conçus pour des moteurs électriques excités peut provoquer une chute de charge et détruire le moteur électrique.