Entraînement électrique à thyristor
 Dans l'industrie, les actionneurs à vannes semi-conductrices contrôlées - les thyristors - sont largement utilisés. Les thyristors sont fabriqués pour des courants jusqu'à des centaines d'ampères, pour des tensions jusqu'à 1000 volts ou plus. Ils se distinguent par un rendement élevé, une taille relativement petite, une vitesse élevée et la capacité de travailler dans une large gamme de températures ambiantes (de -60 à +60 ° C).
Dans l'industrie, les actionneurs à vannes semi-conductrices contrôlées - les thyristors - sont largement utilisés. Les thyristors sont fabriqués pour des courants jusqu'à des centaines d'ampères, pour des tensions jusqu'à 1000 volts ou plus. Ils se distinguent par un rendement élevé, une taille relativement petite, une vitesse élevée et la capacité de travailler dans une large gamme de températures ambiantes (de -60 à +60 ° C).
Le thyristor n'est pas un appareil entièrement contrôlable, qui est activé en appliquant le potentiel correspondant à l'électrode de commande, et n'est désactivé que par interruption forcée du circuit de courant en raison de la tension d'interruption, de sa transition naturelle par zéro ou de la fourniture d'un amortissement tension de signe opposé. En modifiant la synchronisation de l'alimentation de la tension de commande (son retard), vous pouvez régler la valeur moyenne de la tension redressée et donc la vitesse du moteur.
La valeur moyenne de la tension redressée en l'absence de régulation est principalement déterminée par le circuit de commutation du convertisseur à thyristors. Les circuits de transducteur sont divisés en deux classes : zéro pull et ponté.
Dans les installations de moyenne et forte puissance, les circuits convertisseurs en pont sont principalement utilisés, principalement pour deux raisons :
-
moins de tension sur chacun des thyristors,
-
absence d'une composante de courant constante circulant dans les enroulements du transformateur.
Les circuits convertisseurs peuvent également différer par le nombre de phases : d'une dans les installations de faible puissance à 12 — 24 dans les convertisseurs puissants.
Toutes les variantes de convertisseurs à thyristor ainsi que des propriétés positives, telles qu'une faible inertie, l'absence d'éléments rotatifs, une taille plus petite (par rapport aux convertisseurs électromécaniques), présentent un certain nombre d'inconvénients :
1. Connexion dure au réseau : toutes les fluctuations de tension dans le réseau sont transmises directement au système d'entraînement et la charge augmente, les axes du moteur sont immédiatement transférés au réseau et provoquent des chocs de courant.
2. Faible facteur de puissance lors du réglage de la tension vers le bas.
3. Génération d'harmoniques supérieures, charge sur le réseau électrique.
Les caractéristiques mécaniques d'un moteur entraîné par un convertisseur à thyristor sont déterminées par la tension appliquée à l'induit et la nature de son évolution avec la charge, c'est-à-dire les caractéristiques externes du convertisseur et les paramètres du convertisseur et du moteur.
Le dispositif et le principe de fonctionnement du thyristor
Un thyristor (Fig. 1, a) est un semi-conducteur au silicium à quatre couches avec deux jonctions pn et une jonction n-p. L'intensité du courant Az traversant le thyristor sous l'action de la tension d'anode Ua dépend du courant Az lors de la commande traversant l'électrode de commande sous l'action de la tension de commande Uy.
S'il n'y a pas de courant de commande (Azy = 0), alors à mesure que la tension U augmente, le courant A dans le circuit de l'utilisateur P augmentera, tout en restant une très petite valeur (Fig. 1, b).

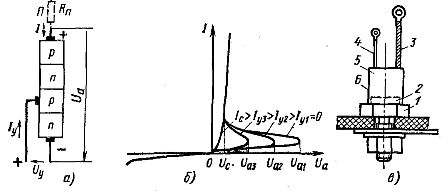
Riz. 1. Schéma fonctionnel (a), caractéristique courant-tension (b) et construction (c) du thyristor
A ce moment, la jonction n-p activée dans la direction non conductrice a une résistance élevée. A une certaine valeur Ua1 de la tension d'anode, appelée tension d'ouverture, d'amorçage ou de commutation, il se produit un claquage par avalanche de la couche de blocage, sa résistance devient faible et l'intensité du courant augmente jusqu'à une valeur déterminée selon la loi d'Ohm par la résistance Rp de l'utilisateur P.
Lorsque le courant Iy augmente, la tension Ua diminue. Le courant Iu, auquel la tension Ua atteint la valeur la plus basse, est appelé courant I avec correction.
Le thyristor se ferme lorsque la tension Ua est supprimée ou lorsque son signe change. Le courant nominal I du thyristor est la plus grande valeur moyenne du courant circulant dans le sens direct qui ne provoque pas de surchauffe inacceptable.
La tension nominale Un est appelée la tension d'amplitude la plus élevée autorisée à laquelle la fiabilité donnée de l'appareil est assurée.
La chute de tension ΔUncréée par le courant nominal est appelée chute de tension nominale (généralement ΔUn = 1 — 2 V).
La valeur de l'intensité du courant Ic de la correction fluctue dans les limites de 0,1 à 0,4 A à une tension Uc de 6 à 8 V.
Le thyristor s'ouvre de manière fiable avec une durée d'impulsion de 20 à 30 μs. L'intervalle entre les impulsions ne doit pas être inférieur à 100 μs. Lorsque la tension Ua tombe à zéro, le thyristor se bloque.
La conception externe du thyristor est illustrée à la fig.1, v… Base cuivre 1 seizième structure quadricouche silicium 2 avec queue filetée, avec puissance négative 3 et commande de 4 sorties. La structure en silicium est protégée par un boîtier métallique cylindrique 5. L'isolant est fixé dans le boîtier 6. Un filetage dans l'embase 1 permet d'installer un thyristor et de connecter la source de tension anodique au pôle positif.
Lorsque la tension Ua augmente, le courant de commande nécessaire pour ouvrir le thyristor diminue (voir Fig. 1, b). Le courant d'ouverture de la commande est proportionnel à la tension d'ouverture de la commande uyo.
Si Uа change selon la loi sinusoïdale (Fig. 2), alors la tension requise et l'ouverture 0 peuvent être représentées par une ligne pointillée. Si la tension de commande appliquée Uy1 est constante et que sa valeur est inférieure à la valeur minimale de la tension uuo, alors le thyristor ne s'ouvre pas.
Si la tension de commande est portée à la valeur Uy2, le thyristor s'ouvrira dès que la tension Uy2 deviendra supérieure à la tension uyo. En modifiant la valeur uó, vous pouvez modifier l'angle d'ouverture du thyristor dans la plage de 0 à 90°.
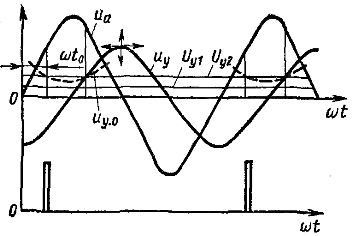
Riz. 2. Contrôle des thyristors
Pour ouvrir le thyristor à des angles supérieurs à 90 °, une tension de commande variable uy est utilisée, qui change, par exemple, de manière sinusoïdale. A une tension correspondant à l'intersection de la sinusoïde de cette tension avec la courbe en pointillé uuo = f (ωt), le Tiristor s'ouvre.
En déplaçant la sinusoïde uyo horizontalement vers la droite ou vers la gauche, on peut modifier l'angle ωt0 d'ouverture du thyristor. Cette commande d'angle d'ouverture est appelée horizontale. Il est effectué à l'aide de commutateurs de phase spéciaux.
En déplaçant la même onde sinusoïdale verticalement vers le haut ou vers le bas, vous pouvez également modifier l'angle d'ouverture. Une telle gestion est dite verticale. Dans ce cas, avec une commande de tension variable tyy, ajoutez algébriquement une tension constante, par exemple la tension Uy1... L'angle d'ouverture est ajusté en modifiant l'amplitude de cette tension.
Une fois ouvert, le thyristor reste ouvert jusqu'à la fin de l'alternance positive et la tension de commande n'affecte pas son fonctionnement. Cela permet également d'appliquer une commande par impulsions en appliquant périodiquement des impulsions de tension de commande positives au bon moment (Fig. 2 en bas). Cela augmente la clarté du contrôle.
En modifiant l'angle d'ouverture du thyristor d'une manière ou d'une autre, des impulsions de tension de différentes formes peuvent être appliquées à l'utilisateur. Cela modifie la valeur de la tension moyenne aux bornes de l'utilisateur.
Divers dispositifs sont utilisés pour contrôler les thyristors. Dans le schéma illustré à la fig. 3, la tension secteur alternative est appliquée à l'enroulement primaire du transformateur Tp1.
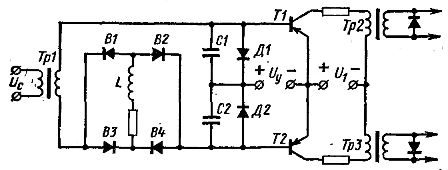
Riz. 3. Circuit de commande des thyristors
Un redresseur pleine onde B est inclus dans le circuit secondaire de ce transformateur.1, B2, B3, B4 avec une inductance significative L dans le circuit continu. Le courant d'onde pratique est pratiquement éliminé. Mais un tel courant continu ne peut être obtenu que par redressement pleine onde d'un courant alternatif ayant la forme illustrée à la Fig. 4, un.
Ainsi, dans ce cas, le redresseur B1, B2, B3, B4 (voir Fig. 3) est un convertisseur sous forme de courant alternatif. Dans ce schéma, les condensateurs C1 et C2 alternent en série avec des impulsions de courant rectangulaires (Fig. 4, a).Dans ce cas, sur les plaques des condensateurs C1 et C2 (Fig. 4, b), une tension transversale en dents de scie est formée, appliquée aux bases des transistors T1 et T2 (voir Fig. 3).
Cette tension est appelée tension de référence. La tension continue Uy agit également dans le circuit principal de chaque transistor. Lorsque la tension de scie est nulle, la tension Uy crée des potentiels positifs aux bases des deux transistors. Chaque transistor s'ouvre avec un courant de base à un potentiel de base négatif.
Cela se produit lorsque les valeurs négatives de la tension de référence de la scie s'avèrent supérieures à Uy (Fig. 4, b). Cette condition est remplie en fonction de la valeur de Uy à différentes valeurs de l'angle de phase. Dans ce cas, le transistor s'ouvre pendant des durées différentes, en fonction de l'amplitude de la tension Uy.
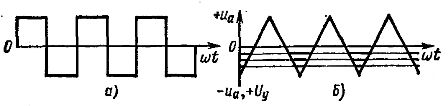
Riz. 4. Diagrammes des tensions de commande des thyristors
Lorsque l'un ou l'autre transistor s'ouvre, une impulsion de courant rectangulaire traverse l'enroulement primaire du transformateur Tr2 ou Tr3 (voir Fig. 3). Lorsque le front montant de cette impulsion passe, une impulsion de tension se produit dans l'enroulement secondaire, qui est appliqué à l'électrode de commande du thyristor.
Lorsque l'arrière de l'impulsion de courant traverse l'enroulement secondaire, une impulsion de tension de polarité opposée se produit. Cette impulsion est fermée par une diode à semi-conducteur qui contourne l'enroulement secondaire et n'est pas appliquée au thyristor.
Lorsque les thyristors sont commandés (voir Fig. 3) avec deux transformateurs, deux impulsions sont générées, déphasées de 180 °.
Systèmes de commande de moteurs à thyristors
Dans les systèmes de commande à thyristors pour moteurs à courant continu, une modification de la tension d'induit CC du moteur est utilisée pour contrôler sa vitesse. Dans ces cas, des schémas de redressement multiphases sont généralement utilisés.
En figue. 5, et le schéma le plus simple de ce type est représenté par une ligne continue. Dans ce circuit, chacun des thyristors T1, T2, T3 est connecté en série avec l'enroulement secondaire du transformateur et l'induit du moteur ; NS. etc. c) les enroulements secondaires sont déphasés. Par conséquent, des impulsions de tension déphasées les unes par rapport aux autres sont appliquées à l'induit du moteur lors de la commande de l'angle d'ouverture des thyristors.
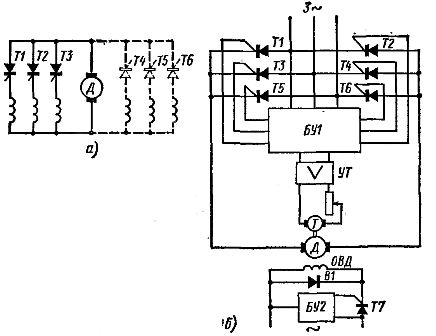
Riz. 5. Circuits de commande des thyristors
Dans un circuit polyphasé, des courants intermittents et continus peuvent traverser l'induit du moteur, en fonction de l'angle d'amorçage sélectionné des thyristors. Un entraînement électrique réversible (Fig. 5, a, l'ensemble du circuit) utilise deux jeux de thyristors: T1, T2, T3 et T4, T5, T6.
En ouvrant les thyristors d'un certain groupe, ils modifient le sens du courant dans l'induit du moteur électrique et, par conséquent, le sens de sa rotation.
L'inversion du moteur peut également être obtenue en changeant le sens du courant dans l'enroulement de champ du moteur. Une telle inversion est utilisée dans les cas où une vitesse élevée n'est pas requise car l'enroulement de champ a une inductance très élevée par rapport à l'enroulement d'induit. Une telle course inverse est souvent utilisée pour les entraînements à thyristor du mouvement principal des machines à couper les métaux.
Le second jeu de thyristors permet également de réaliser des modes de freinage nécessitant un changement de sens du courant dans l'induit du moteur électrique.Les thyristors dans les circuits d'entraînement considérés sont utilisés pour allumer et éteindre le moteur, ainsi que pour limiter les courants de démarrage et de freinage, éliminant ainsi la nécessité d'utiliser des contacteurs, ainsi que des rhéostats de démarrage et de freinage.
Dans les circuits de commande à thyristor à courant continu, les transformateurs de puissance ne sont pas souhaitables. Ils augmentent la taille et le coût de l'installation, de sorte qu'ils utilisent souvent le circuit illustré à la Fig. 5B.
Dans ce circuit, l'amorçage du thyristor est commandé par l'unité de commande BU1. Il est connecté à un réseau de courant triphasé, ce qui lui permet d'alimenter et d'adapter les phases des impulsions de commande à la tension d'anode des thyristors.
Un entraînement à thyristor utilise généralement le retour de vitesse du moteur. Dans ce cas, une génératrice tachymétrique T et un amplificateur à transistor intermédiaire UT sont utilisés. La rétroaction par courriel est également utilisée. etc. c) moteur électrique, réalisé par l'action simultanée d'une contre-réaction sur la tension et d'une contre-réaction positive sur le courant d'induit.
Pour régler le courant d'excitation, un thyristor T7 avec une unité de commande BU2 est utilisé. Aux demi-cycles négatifs de la tension d'anode, lorsque le thyristor T7 ne fait pas passer de courant, le courant dans l'OVD continue de circuler en raison de e. etc. C. auto-induction, fermeture par la vanne de dérivation B1.
Entraînements électriques à thyristor avec contrôle de la largeur d'impulsion
Dans les entraînements à thyristor considérés, le moteur est alimenté par des impulsions de tension d'une fréquence de 50 Hz. Pour augmenter la vitesse de réponse, il est recommandé d'augmenter la fréquence des impulsions.Ceci est réalisé dans les entraînements à thyristor avec contrôle de la largeur d'impulsion, où des impulsions CC rectangulaires de durée variable (latitude) avec une fréquence allant jusqu'à 2-5 kHz traversent l'induit du moteur. En plus d'une réponse à grande vitesse, un tel contrôle fournit de grandes plages de contrôle de vitesse du moteur et des performances énergétiques supérieures.
Avec le contrôle de la largeur d'impulsion, le moteur est alimenté par un redresseur non contrôlé et le thyristor connecté en série avec l'induit est périodiquement fermé et ouvert. Dans ce cas, les impulsions CC traversent le circuit d'induit du moteur. Une modification de la durée (latitude) de ces impulsions entraîne une modification de la vitesse de rotation du moteur électrique.
Puisque dans ce cas le thyristor fonctionne à tension constante, des circuits spéciaux sont utilisés pour le fermer. L'un des schémas de contrôle de largeur d'impulsion les plus simples est illustré à la Fig. 6.
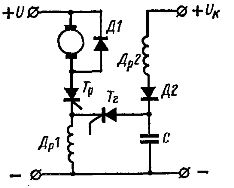
Riz. 6. Commande électrique de thyristor avec le contrôle de largeur d'impulsion
Dans ce circuit, le thyristor Tr est bloqué lorsque le thyristor d'amortissement Tr est passant. Lorsque ce thyristor s'ouvre, le condensateur chargé C se décharge vers Manette de Gaz Dr1, créant un e significatif. etc. c) Dans ce cas, une tension apparaît aux extrémités de la self, supérieure à la tension U du redresseur et dirigée vers elle.
Par l'intermédiaire d'un redresseur et d'une diode shunt D1, cette tension est appliquée au thyristor Tr et provoque son blocage. Lorsque le thyristor est bloqué, le condensateur C est rechargé à la tension de commutation Uc > U.
En raison de la fréquence accrue des impulsions de courant et de l'inertie de l'induit du moteur, la nature impulsionnelle de l'alimentation ne se reflète pratiquement pas dans la régularité de la rotation du moteur. Les thyristors Tr et Tr sont ouverts par un circuit spécial de déphasage qui permet de modifier la largeur d'impulsion.
L'industrie électrique produit diverses modifications d'entraînements de courant continu à thyristors entièrement régulés. Parmi eux se trouvent des variateurs avec des plages de contrôle de vitesse de 1:20 ; 1 : 200 ; 1 : 2000 par changement de tension, entraînements irréversibles et réversibles, avec et sans freinage électrique. La commande est effectuée au moyen de dispositifs à impulsions de phase à transistors. Les variateurs utilisent une rétroaction négative sur le régime moteur et le compteur électronique, etc. avec
Les avantages des entraînements à thyristors sont des caractéristiques énergétiques élevées, une taille et un poids réduits, l'absence de toute machine tournante autre qu'un moteur électrique, une vitesse élevée et une disponibilité constante au travail.Le principal inconvénient des entraînements à thyristors est leur coût encore élevé, qui dépasse largement le coût des entraînements avec une machine électrique et des amplificateurs magnétiques.
Actuellement, il existe une tendance constante au remplacement généralisé des entraînements CC à thyristor par variateurs de fréquence à fréquence variable.