Sélection de moteurs pour ascenseurs et engins de levage par puissance
 Les ascenseurs modernes pour passagers et marchandises des bâtiments résidentiels et administratifs, ainsi que certaines machines de levage de mines, sont réalisés avec un contrepoids ou, comme on l'appelle parfois, avec un contrepoids. Dans les machines minières, l'équilibrage, comme on l'a déjà noté, est souvent effectué non pas par un contrepoids, mais par un deuxième navire de levage.
Les ascenseurs modernes pour passagers et marchandises des bâtiments résidentiels et administratifs, ainsi que certaines machines de levage de mines, sont réalisés avec un contrepoids ou, comme on l'appelle parfois, avec un contrepoids. Dans les machines minières, l'équilibrage, comme on l'a déjà noté, est souvent effectué non pas par un contrepoids, mais par un deuxième navire de levage.
Le contrepoids pour ascenseurs est choisi pour équilibrer le poids du navire de levage (cabine) et une partie de la charge nominale à soulever :

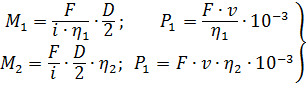
où GH est le poids de la charge de levage nominale, N ; G0 — poids de la cabine, N ; Gnp est le poids du contrepoids, N ; α est le facteur d'équilibrage, généralement pris égal à 0,4-0,6.
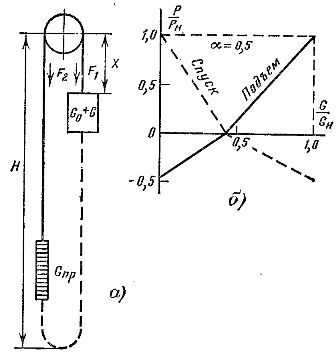
Riz. 1. Pour calculer la charge sur l'arbre du moteur de l'ascenseur.
La nécessité d'équilibrer les navires lourds est évidente, car pour les déplacer en l'absence de contrepoids, une augmentation correspondante de la puissance du moteur est nécessaire. La capacité à équilibrer une partie de la charge utile nominale se révèle lors de la détermination de la puissance équivalente pour une courbe de charge donnée.Il n'est pas difficile de suivre, par exemple, que si l'ascenseur fonctionne principalement pour soulever la charge et abaisser la cabine vide, alors la puissance équivalente du moteur selon le diagramme de charge a un minimum à α = 0,5.
La présence d'un contrepoids entraîne un aplatissement de la courbe de charge du moteur, ce qui réduit son échauffement en fonctionnement. En se référant au schéma représenté sur la Fig. 1, a, puis avec la valeur pondérale du contrepoids

et l'absence de cordage d'équilibrage et de friction cabine et de contrepoids sur les guides, on peut écrire :


où gk est le poids de 1 m de corde, N / m.
Résistance à la traction

Le couple et la puissance de l'arbre moteur sont déterminés à l'aide des formules suivantes :
où M1, P1 — couple et puissance lorsque le variateur fonctionne en mode moteur, Nm et kW, respectivement ; M2, P2 — couple et puissance lorsque le variateur fonctionne en mode générateur, Nm et kW, respectivement ; η1, η2 - efficacité de l'engrenage à vis sans fin avec transfert d'énergie direct et inverse.
Les valeurs de η1 et η2 dépendent de manière non linéaire de la vitesse de la vis sans fin et peuvent être calculées par les formules
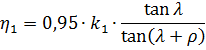

ici λ est l'angle de montée de la ligne spirale sur le cylindre d'indexation de la vis sans fin ; k1 est un coefficient prenant en compte les pertes dans les roulements et bain d'huile de la boîte de vitesses ; ρ — angle de frottement, en fonction de la vitesse de rotation de la vis sans fin.
De la formule de la force sur la poulie de traction, il ressort qu'en l'absence de câble d'équilibrage, la charge sur l'entraînement électrique du treuil de levage dépend de la position du navire de levage.
En raison de leur grande capacité de charge - jusqu'à 10 tonnes, des vitesses de déplacement élevées - 10 m / s et plus, des hauteurs de levage élevées de 200 à 1000 m et des conditions de travail difficiles, les machines de levage de mine sont équipées de câbles en acier de grande masse. Imaginez, par exemple, qu'une passe soit abaissée à l'horizon inférieur, tandis que l'autre est au-dessus, et qu'à ce moment-là, elle est déchargée. Dans cette position, toute la corde de tête est déséquilibrée, et au début de l'ascension le moteur doit vaincre le moment statique généré par le poids de la charge et de la corde. L'équilibrage de la corde s'effectue au milieu du parcours des bennes. Ensuite, il casse à nouveau et le poids de la partie descendante de la corde aidera à décharger le moteur.
Un chargement inégal, en particulier dans les mines profondes, entraîne la nécessité de surestimer la puissance du moteur.Par conséquent, à une hauteur de levage supérieure à 200-300 m, il est recommandé d'équilibrer les câbles de levage de tête à l'aide de câbles de queue suspendus des navires de levage. Habituellement, le câble de queue est sélectionné avec la même section et la même longueur que le câble principal, de sorte que le système de levage s'avère équilibré.
Étant donné que la charge change pendant le fonctionnement des ascenseurs et des machines de levage, afin de déterminer la puissance ou le moment de l'arbre moteur pour chaque charge, il est pratique de construire un graphique de la dépendance de ces valeurs sur la charge en plusieurs points, qui a approximativement le même caractère que celui indiqué sur la fig. 1b, puis l'utiliser dans la construction de diagrammes de charge.
Dans ce cas, le mode de fonctionnement de l'entraînement électrique de l'engin de levage doit être connu, qui est largement déterminé par la durée relative de l'activation PV et le nombre de démarrages par heure du moteur. Pour les ascenseurs, par exemple, le mode de fonctionnement de l'entraînement électrique est déterminé par le lieu d'installation et le but de l'ascenseur.
Dans les bâtiments résidentiels, le programme de circulation est relativement uniforme et la durée relative - PV et fréquence de démarrage du moteur h est égale à 40 % et 90-120 démarrages par heure, respectivement. Dans les immeubles de bureaux de grande hauteur, la charge de l'ascenseur augmente fortement pendant les heures d'arrivée et de départ des employés du travail et, par conséquent, pendant la pause déjeuner, les valeurs élevées auront PV et h-40-60% et 150 -200 démarrages par heure.
Une fois le dessin terminé charge statique sur l'arbre du moteur, le système d'entraînement électrique et le moteur de levage ont été sélectionnés, la deuxième étape de construction d'un diagramme de charge peut être effectuée - en tenant compte de l'effet du transitoire sur le diagramme de charge.
Afin de construire un diagramme de charge complet, il est nécessaire de prendre en compte les temps d'accélération et de décélération de la propulsion électrique, le temps d'ouverture et de fermeture des portes, le nombre d'arrêts pendant le déplacement de la voiture, le temps d'entrée et de sortie des passagers pendant le cycle de travail le plus typique. Pour les ascenseurs à portes à commande automatique, la perte de temps totale déterminée par le fonctionnement des portes et le remplissage de la cabine est de 6 à 8 s.
Les temps d'accélération et de décélération de la voiture peuvent être déterminés à partir du diagramme de mouvement si la vitesse nominale de la voiture et les valeurs admissibles d'accélération (décélération) et de jerk sont connues. Selon le diagramme de charge, construit selon les modes statiques et dynamiques indiqués du système d'entraînement électrique, il est nécessaire d'effectuer un calcul informatique du moteur lorsqu'il est chauffé, en utilisant l'une des méthodes bien connues: pertes moyennes ou valeurs équivalentes.
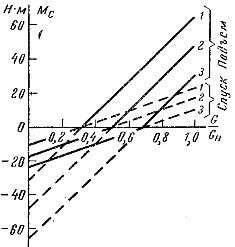
Riz. 2. Dépendances du couple de l'entraînement électrique sur la charge de la cabine, l'ascenseur, lorsque ce dernier est au premier étage (1), au milieu de la gaine (2) et au dernier étage (3).

Un exemple. Selon les données techniques d'un ascenseur de passagers à grande vitesse, déterminez les moments statiques sur l'arbre du moteur dans différents modes de fonctionnement.
Donné:
• capacité de charge maximale Gn = = 4900 N ;
• vitesse de déplacement v = 1 m/s ;
• hauteur de levage H = = 43 m ;
• masse cabine G0 = 6860 N ;
• poids du contrepoids Gnp = 9310 N ;
• diamètre de la poutre de traction Dm = 0,95 m ;
• rapport de transmission de la boîte de vitesses du treuil i = 40 ;
• efficacité de la transmission, compte tenu du frottement de la cabine sur les guides d'arbre η = 0,6 ;
• poids de la corde GKAH = 862 N.
Tableau 1

Résistance à la traction:


Lorsque le système d'ascenseur fonctionne, lorsque Fc > 0, la machine électrique motrice fonctionne en mode moteur, et lorsque Fc est à 0, et en mode moteur lorsque Fc < 0.
Les résultats du calcul des moments statiques selon la formule sont résumés dans un tableau. 1 et sont représentés sur le graphique de la fig. 2.Notez que des calculs plus précis doivent prendre en compte la résistance au mouvement des guides d'arbre, qui est de 5 à 15% de Fc.