Caractéristiques mécaniques des moteurs électriques et mécanismes de production
 Lors de la conception d'un entraînement électrique, le moteur électrique doit être choisi de manière à ce que ses caractéristiques mécaniques correspondent aux caractéristiques mécaniques du mécanisme de production. Les caractéristiques mécaniques donnent la relation des variables en régime permanent.
Lors de la conception d'un entraînement électrique, le moteur électrique doit être choisi de manière à ce que ses caractéristiques mécaniques correspondent aux caractéristiques mécaniques du mécanisme de production. Les caractéristiques mécaniques donnent la relation des variables en régime permanent.
Une caractéristique mécanique du mécanisme est appelée rapport entre la vitesse angulaire et le moment de résistance du mécanisme, ramené à l'arbre moteur) ω = f (Mc).
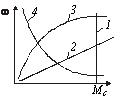
Riz. 1. Caractéristiques mécaniques des mécanismes
Parmi toute la variété, il existe plusieurs types caractéristiques de caractéristiques mécaniques des mécanismes:
1. Caractéristique avec un moment résistant indépendant de la vitesse (droite 1 sur la Fig. 1). La caractéristique mécanique indépendante de la vitesse est tracée sous la forme d'une droite parallèle à l'axe de rotation, ici verticale. Une telle caractéristique est possédée, par exemple, par des grues, des treuils, des pompes à piston à hauteur de refoulement constante, etc.
2.Une caractéristique avec un moment résistant dépendant linéairement de la vitesse (ligne 2 de la Fig. 1). Cette dépendance est inhérente, par exemple, à la commande d'un générateur de courant continu à excitation indépendante fonctionnant à charge constante.
3. Caractéristique avec une augmentation non linéaire du couple (courbe 3 de la Fig. 1). Des exemples typiques sont le fonctionnement des ventilateurs, des pompes centrifuges, des hélices. Pour ces mécanismes, le moment Mc dépend du carré de la vitesse angulaire ω... C'est ce que l'on appelle caractéristique mécanique parabolique (ventilateur).
4. Caractéristique avec moment résistant non linéairement décroissant (courbe 4 de la Fig. 1). Ici, le moment de traînée est inversement proportionnel à la vitesse de rotation. Dans ce cas, la puissance reste constante sur toute la plage de vitesse de fonctionnement du mécanisme. Par exemple, dans les mécanismes du mouvement principal de certaines machines à couper les métaux (tournage, fraisage, perçage), le moment Mc change de manière inversement proportionnelle à ω, et la puissance consommée par le mécanisme reste constante.
Les caractéristiques mécaniques du moteur électrique sont appelées la dépendance de sa vitesse angulaire sur le couple ωd = f (M). Ici, il convient de garder à l'esprit que le moment M sur l'arbre du moteur, quel que soit le sens de rotation, a un signe positif - le moment du mouvement. Dans le même temps, le moment de résistance Mc est de signe négatif.
A titre d'exemples, les Fig. 2 montre les caractéristiques mécaniques : 1 - moteur synchrone ; 2 — Moteur à courant continu à excitation indépendante ; 3 — Moteur à courant continu avec excitation série.
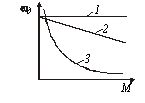 Riz. 2. Caractéristiques mécaniques des moteurs électriques
Riz. 2. Caractéristiques mécaniques des moteurs électriques
Pour évaluer les propriétés des caractéristiques mécaniques d'un entraînement électrique, le concept de rigidité caractéristique est utilisé.La rigidité de la caractéristique mécanique est déterminée par l'expression
β = dM / dω
où dM — modification du couple moteur ; dωd — la variation correspondante de la vitesse angulaire.
Pour les caractéristiques linéaires, la valeur β reste constante, pour les non linéaires, elle dépend du point de fonctionnement.
En utilisant ce concept, les caractéristiques illustrées à la Fig. 2, peut être évaluée qualitativement comme suit : 1 — absolument rigide (β = ∞) ; 2 - solide ; 3 - doux.
Une caractéristique absolument difficile - la vitesse de rotation du moteur reste inchangée lorsque la charge du moteur passe de zéro à la valeur nominale. Les moteurs synchrones ont cette caractéristique.
Caractéristique rigide - la vitesse de rotation change peu lorsque la charge passe de zéro à la valeur nominale. Cette caractéristique est possédée par un moteur à courant continu à excitation parallèle ainsi que par un moteur à induction dans la région de la partie linéaire de la caractéristique.
Une caractéristique rigide est considérée comme une caractéristique dans laquelle le changement de vitesse ne dépasse pas environ 10 % de la vitesse nominale lorsque la charge passe de zéro à nominale.
Caractéristique souple - la vitesse du moteur change de manière significative avec des changements de charge relativement faibles. Cette caractéristique est possédée par un moteur à courant continu à excitation série, mixte ou parallèle, mais avec une résistance supplémentaire dans le circuit d'induit, ainsi qu'asynchrone avec résistance dans le circuit du rotor.
Pour la plupart des mécanismes de production, on utilise des moteurs asynchrones à cage d'écureuil, qui ont des caractéristiques mécaniques rigides.
Toutes les caractéristiques mécaniques des moteurs électriques sont divisées en naturelles et artificielles.
Les caractéristiques mécaniques naturelles font référence aux conditions de fonctionnement du moteur avec les valeurs nominales des paramètres.
Par exemple, pour un moteur à excitation parallèle, la caractéristique naturelle peut être tracée pour le cas où la tension d'induit et le courant d'excitation ont des valeurs nominales et qu'il n'y a pas de résistance supplémentaire dans le circuit d'induit.
La caractéristique naturelle d'un moteur à induction correspond à la tension nominale et à la fréquence nominale du courant alternatif fourni au stator du moteur, à condition qu'il n'y ait pas de résistance supplémentaire dans le circuit du rotor.
Ainsi, pour chaque moteur, une seule caractéristique naturelle peut être construite et un nombre illimité de artificielles. Par exemple, chaque nouvelle valeur de résistance d'induit d'un moteur à courant continu ou dans le circuit du rotor d'un moteur à induction a ses propres caractéristiques mécaniques.
