Enroulement stator et rotor des machines électriques à courant alternatif
Enroulement d'un produit électrique (appareil) - un ensemble de bobines ou de bobines situées d'une certaine manière et connectées, conçues pour créer ou utiliser un champ magnétique, ou pour obtenir une valeur donnée de résistance d'un produit électrique (appareil). d'un produit électrique (appareil) - une bobine d'un produit électrique (appareil) ou une partie de celui-ci, constituée comme une unité structurelle distincte (GOST 18311-80).
L'article parle du dispositif des enroulements du stator et du rotor des machines électriques à courant alternatif.
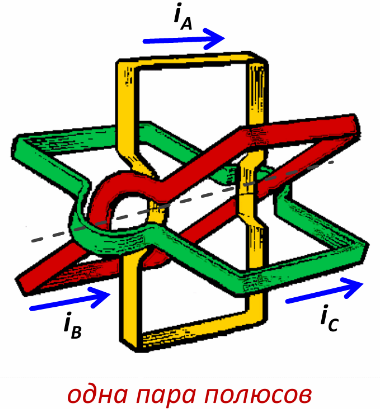
Disposition spatiale des enroulements du stator :
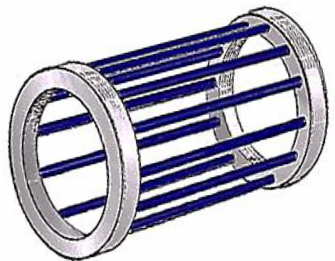
 Rotor à cage d'écureuil :
Rotor à cage d'écureuil :
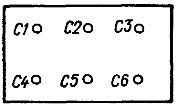
Un stator avec douze fentes, dans chacune desquelles un fil est posé, est schématiquement représenté sur la fig. 1, un. Les connexions entre les conducteurs toronnés sont indiquées pour une seule des trois phases ; les débuts des phases A, B, C de la bobine sont notés C1, C2, C3 ; extrémités — C4, C5, C6.Les parties de la bobine posées dans les canaux (la partie active de la bobine) sont classiquement représentées sous forme de tiges, et les connexions entre les fils dans les rainures (connexions d'extrémité) sont représentées en trait plein.
Le noyau du stator a la forme d'un cylindre creux, qui est un empilement ou une série d'empilements (séparés par des conduits de ventilation) constitués de tôles d'acier électrique. Sur les petites et moyennes machines, chaque feuille est estampée sous la forme d'un anneau avec des rainures le long de la circonférence intérieure. En figue. 1, b, une feuille de stator avec des rainures d'une des formes utilisées est donnée.
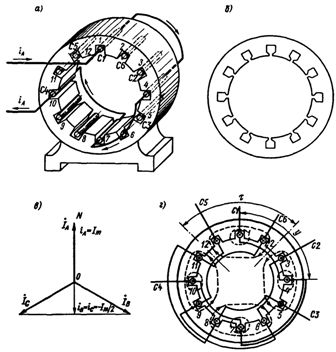
Riz. 1. L'emplacement de l'enroulement dans les fentes du stator et la répartition des courants dans les fils
Soit maximale la valeur instantanée du courant iA de la première phase à un certain instant et le courant est dirigé du début de la phase C1 vers sa fin C4. Nous considérerons ce courant comme positif.
En déterminant les courants instantanés dans les phases en tant que projection des vecteurs rotatifs sur l'axe fixe ON (Fig.1, c), on obtient que les courants des phases B et C à un instant donné sont négatifs, c'est-à-dire qu'ils sont dirigés de la fin des phases au début.
Traçons-le sur la fig. 1d la formation d'un champ magnétique tournant. Au moment en question, le courant de la phase A est dirigé de son début à sa fin, c'est-à-dire que si dans les fils 1 et 7 il nous laisse en dehors du plan du dessin, alors dans les fils 4 et 10 il passe derrière le plan du dessin à nous (voir Fig. 1, a et d).
Dans la phase B, le courant à cet instant passe de la fin de la phase à son début.En connectant les fils de la deuxième phase selon l'échantillon de la première, on peut obtenir que le courant de la phase B passe par les fils 12, 9, 6, 3 ; en même temps, à travers les fils 12 et 6, le courant nous laisse en dehors du plan du dessin, et à travers les fils 9 et 3 - vers nous. Nous obtenons une image de la distribution des courants dans la phase C en utilisant l'échantillon de la phase B.
Les directions des courants sont données sur la fig. 1, d ; les lignes pointillées montrent les lignes de champ magnétique générées par les courants statoriques ; les directions des lignes sont déterminées par la règle de la vis à droite. On peut voir sur la figure que les fils forment quatre groupes avec les mêmes directions de courant et que le nombre de pôles 2p du système magnétique est de quatre. Les régions du stator où les lignes magnétiques quittent le stator sont les pôles nord et les régions où les lignes magnétiques entrent dans le stator sont les pôles sud. Un arc de cercle statorique occupé par un pôle est appelé séparation des pôles.
Le champ magnétique en différents points de la circonférence du stator est différent. Le schéma de distribution du champ magnétique le long de la circonférence du stator est répété périodiquement à travers chaque séparation bipolaire Angle d'arc 2 pris égal à 360 degrés électriques. Puisqu'il y a p divisions de pôles doubles autour de la circonférence du stator, 360 degrés géométriques valent 360p degrés électriques et un degré géométrique équivaut à p degrés électriques.
En figue. 1d montre les lignes magnétiques pour un certain moment fixe dans le temps. Si nous regardons l'image du champ magnétique pendant plusieurs instants consécutifs dans le temps, nous pouvons nous assurer que le champ tourne à une vitesse constante.
Trouvons la vitesse de rotation du champ.Après un temps égal à la moitié de la période du courant alternatif, les directions de tous les courants sont inversées, grâce à quoi les pôles magnétiques sont inversés, c'est-à-dire que pendant la moitié de la période, le champ magnétique tourne d'une fraction de tour. La vitesse de rotation du champ magnétique du stator, c'est-à-dire la vitesse synchrone, est (en tours par minute)

Le nombre p de paires de pôles ne peut être qu'entier, donc à une fréquence par exemple de 50 Hz, la vitesse synchrone peut être égale à 3000 ; 1500 ; 1000 tr/min etc...
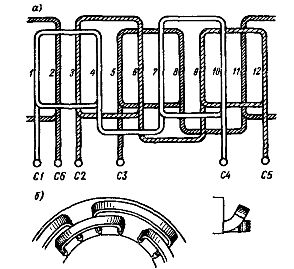
Riz. 2. Schéma détaillé d'un enroulement monocouche triphasé
Les enroulements d'une machine à courant alternatif peuvent être divisés en trois groupes :
1) bobine à bobine ;
2) noyau ;
3) spécial ;
Les bobines spéciales comprennent :
(a) court-circuit en forme de cage d'écureuil;
b) enroulement d'un moteur asynchrone avec commutation sur un nombre différent de pôles ;
c) enroulement d'un moteur asynchrone avec anti-connexions, etc.
En plus de la division ci-dessus, les bobines diffèrent par un certain nombre d'autres caractéristiques, à savoir :
1) par la nature de l'exécution - manuelle, avec motifs et semi-avec motifs ;
2) par emplacement dans la rainure - monocouche et bicouche;
3) par le nombre d'encoches par pôle et phase — enroulements avec un entier q encoches par pôle et phase et enroulements avec un nombre fractionnaire q.
Une bobine est un circuit formé de deux fils connectés en série. Une section ou enroulement est une série de spires connectées en série, situées dans deux fentes et avec une isolation commune du corps.
La section a deux côtés actifs. Le côté actif gauche est appelé le début de la section (bobine) et le côté droit est appelé la fin de la section. La distance entre les côtés actifs de la section est appelée pas de section. Il peut être mesuré soit par le nombre de broches, soit en parties des divisions polaires.
Le pas de la section est dit diamétral s'il est égal à la division polaire et tronqué s'il est inférieur à la division polaire, puisque le pas de section n'est pas supérieur à la division polaire.
Une grandeur caractéristique qui détermine le fonctionnement de la bobine est le nombre d'encoches par pôle et phase, c'est-à-dire le nombre d'encoches occupées par l'enroulement de chaque phase dans une division de pôle :

où z est le nombre d'encoches du stator.
La bobine illustrée à la fig. 1, a, a les données suivantes :

Même pour cette bobine la plus simple, le dessin spatial des fils et de leurs connexions s'avère compliqué, il est donc généralement remplacé par un schéma élargi, où les fils de bobinage ne sont pas représentés sur une surface cylindrique, mais sur un plan (un cylindre surface avec des rainures et une bobine « se déplie » dans un plan). En figue. 2 est un schéma détaillé de l'enroulement statorique considéré.
Dans la figure précédente, pour simplifier, on a montré qu'une partie de la phase A de l'enroulement placée dans les encoches 1 et 4 est constituée de seulement deux fils, c'est-à-dire d'une spire. En fait, chacune de ces parties de l'enroulement tombant sur un pôle est constituée de w spires, c'est-à-dire que dans chaque paire de rainures w fils sont placés, combinés en un seul enroulement. Par conséquent, lors du contournement selon le schéma étendu, par exemple, la phase A de la fente 1, il est nécessaire de contourner les fentes 1 et 4 w fois avant de passer à la fente 7. La distance entre les côtés du tour d'un enroulement ou d'un pas d'enroulement , y est représenté sur la fig. 1, d ; généralement exprimée en termes de nombre de canaux.
Riz. 3. Bouclier de machine asynchrone
Montré sur la fig.1 et 2, l'enroulement du stator est appelé monocouche, car il s'insère dans chaque rainure d'une couche.Pour placer les parties avant qui se croisent dans un plan, elles sont pliées sur différentes surfaces (Fig.2, b). Les enroulements monocouches sont réalisés avec un pas égal à la séparation des pôles (Fig. 2, a), ou ce pas est égal en moyenne à la séparation des pôles pour différents enroulements de la même phase, si y> 1, y< 1... De nos jours, les bobines à double couche sont plus courantes.
Le début et la fin de chacune des trois phases de l'enroulement sont indiqués sur le panneau de la machine, où se trouvent six pinces (Fig. 3). Trois fils linéaires d'un réseau triphasé sont connectés aux bornes supérieures C1, C2, SZ (le début des phases). Les pinces inférieures C4, C5, C6 (les extrémités des phases) sont soit reliées en un point par deux cavaliers horizontaux, soit chacune de ces pinces est reliée à un cavalier vertical avec la pince supérieure située au-dessus.
Dans le premier cas, les trois phases du stator forment une connexion en étoile, dans le second - une connexion en triangle. Si, par exemple, une phase du stator est conçue pour une tension de 220 V, la tension de ligne du réseau auquel le moteur est connecté doit être de 220 V, si le stator est connecté en triangle; lorsqu'il est connecté à une étoile, la tension de la ligne de réseau doit être
Lorsque le stator est connecté en étoile, le fil neutre n'est pas alimenté car le moteur est une charge symétrique au réseau.
Le rotor d'une machine à induction est constitué de tôles d'acier électrique embouties sur un arbre ou sur une structure de support spéciale. Le jeu radial entre le stator et le rotor est le plus petit possible pour assurer une faible résistance dans le trajet du flux magnétique pénétrant dans les deux parties de la machine.
Le plus petit écart autorisé par les exigences technologiques est d'un dixième de millimètre à plusieurs millimètres, selon la puissance et les dimensions de la machine. Les conducteurs de l'enroulement du rotor sont situés dans les fentes le long du rotor formant directement sur sa surface pour assurer le plus grand contact de l'enroulement du rotor avec le champ tournant.
Les machines à induction sont fabriquées avec des rotors à phase et à cage d'écureuil.

Riz. 4. Rotor de phases
Un rotor de phase a généralement un enroulement triphasé, réalisé comme un enroulement de stator, avec le même nombre de pôles. L'enroulement est connecté en étoile ou en triangle ; les trois extrémités de la bobine sont amenées à trois bagues collectrices isolées qui tournent avec l'arbre de la machine. Grâce à des balais montés sur la partie fixe de la machine et coulissant sur des bagues collectrices, un rhéostat de démarrage ou de régulation triphasé est connecté au rotor, c'est-à-dire qu'une résistance active est introduite dans chaque phase du rotor. La vue externe du rotor de phase est illustrée à la fig. 4, trois bagues collectrices sont visibles à l'extrémité gauche de l'arbre. Les moteurs asynchrones à rotor bobiné sont utilisés lorsqu'une régulation en douceur de la vitesse du mécanisme d'entraînement est requise, ainsi que lors de démarrages fréquents du moteur sous charge.
La conception d'un rotor à cage d'écureuil est beaucoup plus simple que celle d'un rotor à phase. Pour l'une des conceptions de la Fig. La figure 5a montre la forme des tôles à partir desquelles le noyau du rotor est assemblé. Dans ce cas, des trous à proximité de la circonférence extérieure de chaque feuille forment des canaux longitudinaux dans l'âme. L'aluminium est coulé dans ces canaux, après sa solidification, des tiges conductrices longitudinales sont formées dans le rotor.Aux deux extrémités du rotor, des anneaux en aluminium sont coulés simultanément, ce qui court-circuite les tiges en aluminium. Le système conducteur résultant est communément appelé une cellule d'écureuil.

Riz. 5. Rotor de cellule d'écureuil
Un rotor à cage est illustré à la fig. 5 B. Aux extrémités du rotor, on aperçoit des aubes de ventilation coulées simultanément avec des bagues d'attelage court. Dans ce cas, les fentes sont biseautées d'une division le long du rotor. La cage d'écureuil est simple, il n'y a pas de contacts glissants, donc les moteurs asynchrones triphasés à cage d'écureuil sont les moins chers, les plus simples et les plus fiables; ce sont les plus courants.