Formes structurelles des moteurs asynchrones
 Formes structurelles externes moteurs asynchrones sont déterminés par la façon dont le moteur est monté et la forme de sa protection contre l'influence de l'environnement. Les performances motrices normales des jambes sont largement répandues (Fig. 1, a). Dans ce cas, l'arbre du moteur doit être horizontal. Les moteurs à brides (Fig. 1, b) sont largement utilisés pour les installations horizontales et verticales.
Formes structurelles externes moteurs asynchrones sont déterminés par la façon dont le moteur est monté et la forme de sa protection contre l'influence de l'environnement. Les performances motrices normales des jambes sont largement répandues (Fig. 1, a). Dans ce cas, l'arbre du moteur doit être horizontal. Les moteurs à brides (Fig. 1, b) sont largement utilisés pour les installations horizontales et verticales.
Ils produisent également des moteurs à induction en ligne qui n'ont pas de cadre, de flasques d'extrémité, d'arbre. Les éléments d'un tel moteur sont intégrés dans les parties du corps de la machine, et l'arbre du moteur est l'un des arbres de la machine (souvent la broche), et le lit est le corps de l'ensemble de la machine, par exemple une tête de meulage (Fig. . 2).
Les moteurs de conception spéciale sont largement distribués à l'étranger, y compris les moteurs de petites dimensions radiales et de longueur importante, et les moteurs à disque, notamment avec un stator en forme de cylindre et un rotor extérieur en forme d'anneau. Des moteurs sont également utilisés, lorsqu'ils sont allumés, le rotor, qui a la forme d'un cône, se déplace dans une direction axiale, développant une force de poussée importante.
Cette force est utilisée pour desserrer le frein mécanique agissant sur l'arbre du moteur après la déconnexion du moteur du réseau. De plus, de nombreuses conceptions de moteurs sont utilisées avec des boîtes de vitesses, des boîtes de vitesses et des variateurs mécaniques attachés qui permettent une régulation en douceur.
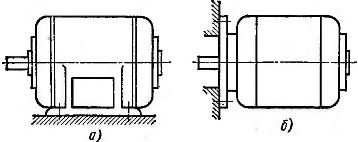
Riz. 1. Conception de moteurs asynchrones
L'inconvénient d'utiliser des moteurs avec des formes de conception spéciales est la difficulté de les remplacer en cas d'accident. Un moteur électrique défectueux ne doit pas être remplacé, mais réparé, et la machine au ralenti pendant la réparation.
Des moteurs avec diverses formes de protection de l'environnement sont utilisés pour entraîner les machines.
Les moteurs blindés ont des grilles qui recouvrent les évents sur les flasques. Cela empêche les corps étrangers de pénétrer dans le moteur et empêche également le travailleur de toucher les pièces rotatives et sous tension. Pour éviter que des gouttelettes de liquide ne tombent d'en haut, les moteurs sont équipés d'évents descendants ou verticaux.
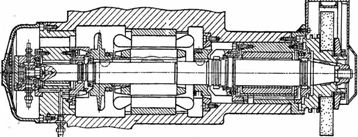
Riz. 2. Moteur de meulage intégré
Cependant, lorsqu'un tel moteur électrique fonctionne dans un atelier, son ventilateur, associé à l'air, aspire des poussières, pulvérise du liquide de refroidissement ou de l'huile, ainsi que de petites particules d'acier ou de fonte qui, adhérant à l'isolation du bobinage et vibrant sous l'influence d'un champ magnétique alternatif, usent rapidement l'isolation.
Les moteurs fermés, dont les écrans d'extrémité n'ont pas de trous de ventilation, ont une protection plus fiable contre les influences environnementales. De tels moteurs, aux mêmes dimensions que les moteurs protégés, en raison d'un refroidissement moins bon, ont moins de puissance.Avec les mêmes puissances et vitesses, le moteur électrique fermé est 1,5 à 2 fois plus lourd que le moteur protégé et, par conséquent, son prix est plus élevé.
La volonté de réduire la taille et le coût des moteurs fermés a conduit à la création de moteurs électriques soufflés fermés. Un tel moteur électrique comporte un ventilateur externe monté sur l'extrémité de l'arbre moteur opposée à l'extrémité motrice et recouvert d'un capot. Ce ventilateur souffle autour du carter du moteur.
Les moteurs de ventilateur sont nettement plus légers et moins chers que les moteurs fermés. Les moteurs soufflés sont le plus souvent utilisés pour entraîner des machines de découpe de métaux. Les moteurs avec d'autres formes de protection de l'environnement sont relativement rarement utilisés pour entraîner des machines à découper les métaux. En particulier, des moteurs électriques fermés sont parfois utilisés pour entraîner des rectifieuses.
Les moteurs électriques sont conçus pour des tensions standard de 127, 220 et 380 V. Le même moteur peut être connecté à des réseaux de tensions différentes, par exemple à des réseaux de tensions de 127 et 220 V, 220 et 380 V. avec deux tensions, le l'enroulement du stator du moteur électrique est connecté en triangle, pour un plus grand - en étoile. Le courant dans les enroulements du moteur électrique et la tension dans ceux-ci seront les mêmes dans les deux cas avec cette inclusion. De plus, ils produisent des moteurs électriques 500 V, leurs stators sont connectés en permanence en étoile.
Les moteurs asynchrones à cage d'écureuil utilisés dans de nombreuses industries sont produits avec une puissance nominale de 0,6 à 100 kW par vitesses synchrones 600, 750, 1000, 1500 et 3000 tr/min.
La section des fils de l'enroulement du moteur électrique dépend de l'intensité du courant qui le traverse. Avec un courant plus important, l'enroulement du moteur aura un volume plus important.La section du circuit magnétique est proportionnelle à l'amplitude du flux magnétique. De cette manière, les dimensions du moteur électrique sont déterminées par les valeurs calculées du courant et du flux magnétique ou du couple nominal du moteur électrique. Puissance nominale du moteur

où P.n — puissance nominale, kW, Mn- moment nominal, N • m, nn- vitesse nominale, tr/min.
La puissance nominale pour la même taille de moteur augmente à mesure que sa vitesse nominale augmente. Par conséquent, les moteurs électriques à basse vitesse sont plus gros que les moteurs à grande vitesse de même puissance.
Lors de la rectification de petits trous, des vitesses de broche de rectification très élevées sont nécessaires pour obtenir des vitesses de coupe adéquates. Ainsi, lors du meulage avec une meule de 3 mm de diamètre à une vitesse de seulement 30 m / s, la vitesse de la broche doit être égale à 200 000 tours par minute. À des vitesses de broche élevées, la force de serrage peut être fortement réduite. Dans le même temps, le meulage des meules et la flexion du mandrin sont réduits, et la finition de surface et la précision d'usinage sont augmentées.
En relation avec ce qui précède, l'industrie utilise de nombreux modèles de ce qu'on appelle. Broches électriques avec des vitesses de rotation de 12 000 à 144 000 tr/min et plus. L'électrobroche (Fig. 3, a) est une broche de meulage sur roulements avec un moteur à cage d'écureuil haute fréquence intégré. Le rotor du moteur est situé entre deux roulements à l'extrémité de la broche opposée à la meule.
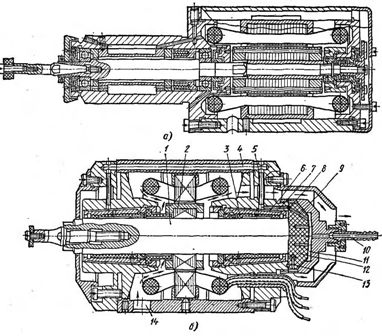
Riz. 3. Electrobroches
Le stator de l'électrobroche est assemblé en tôle d'acier électrique. Une bobine bipolaire est placée dessus.Le rotor du moteur à des vitesses allant jusqu'à 30 000-50 000 tr/min est également composé de tôle et fourni avec un enroulement de court-circuit conventionnel. Ils tendent à réduire au maximum le diamètre du rotor.
Le choix du type de roulement revêt une importance particulière pour le fonctionnement des électrobroches. Des roulements à billes de précision sont couramment utilisés, qui fonctionnent avec une précharge créée à l'aide de ressorts calibrés. De tels roulements sont utilisés pour des vitesses de rotation ne dépassant pas 100 000 tours par minute.
Les roulements aérostatiques sont largement utilisés dans l'industrie (Fig. 3, b). L'arbre 1 du moteur électrique à haute fréquence tourne dans des paliers lubrifiés à l'air 3. La charge axiale est absorbée par le coussin d'air entre l'extrémité de l'arbre et le palier support 12, contre lequel l'arbre est plaqué sous la pression de l'air amené à l'intérieur du carter par le trou 14 de refroidissement du moteur. l'air comprimé passe à travers le filtre et pénètre par le raccord 10 dans la chambre 11. De là, à travers le canal 9 et la rainure circulaire 8, l'air passe dans le canal 7 et la chambre 6. De là, l'air pénètre dans le roulement écart. L'air est fourni au palier gauche par les tuyaux 5 et les canaux 4 dans le carter du moteur.
L'air d'échappement est évacué par les canaux 13. Le coussin d'air dans l'entrefer du palier de support est créé par l'air passant de la chambre 11 à travers le palier en graphite de carbone poreux. Chaque roulement a du laiton conique. Un revêtement en graphite de carbone y est pressé, dont les pores sont remplis de bronze. Avant de démarrer l'électrobroche, de l'air est fourni et des coussins d'air se forment entre la broche et les douilles. Cela élimine les frottements et l'usure des roulements lors du démarrage.Après cela, le moteur est allumé, la vitesse du rotor 2 atteint la vitesse nominale en 5-10 s. Lorsque le moteur est éteint, le rotor 2 tourne en roue libre pendant 3 à 4 minutes. Pour réduire ce temps, un frein électrique est utilisé.
L'utilisation d'airbags réduit considérablement les pertes par frottement dans la broche électrique, la consommation d'air est de 6 à 25 m3 / h.
Des électrobroches sur roulements à lubrification liquide ont également été utilisées. Leur fonctionnement nécessite une circulation continue d'huile sous haute pression, faute de quoi l'échauffement des roulements devient inacceptable.
La production de moteurs électriques à haute fréquence nécessite une fabrication de précision des pièces individuelles, un équilibrage dynamique du rotor, un assemblage précis et la garantie d'une stricte uniformité de l'entrefer entre le stator et le rotor. La fréquence du courant alimentant le moteur électrique haute fréquence est choisie en fonction de la vitesse requise du moteur électrique :

où nSi la fréquence de rotation synchrone du moteur électrique, rpm, f est la fréquence du courant, Hz, p est le nombre de pôles, puisque p = 1, alors

Aux vitesses de rotation synchrones des électrobroches de 12 000 et 120 000 tr/min, la fréquence du courant doit être respectivement égale à 200 et 2 000 Hz.
Des générateurs spéciaux sont utilisés pour alimenter les moteurs à haute fréquence. En figue. La figure 4 montre un générateur à induction synchrone triphasé. Le stator du générateur a des fentes larges et étroites. La bobine de champ, située dans les larges fentes du stator, est alimentée en courant continu. Le champ magnétique des conducteurs de cette bobine est fermé à travers les dents du stator et les saillies du rotor comme indiqué sur la fig. 4 avec ligne pointillée.
Lorsque le rotor tourne, le champ magnétique se déplaçant le long des protubérances du rotor traverse les spires de l'enroulement à courant alternatif situé dans les encoches étroites du stator et induit un e alternatif. etc. C. La fréquence de ce e. etc. v. dépend de la vitesse et du nombre d'oreilles du rotor. Les forces électromotrices induites par le même flux dans les enroulements inducteurs s'annulent en raison de l'activation imminente des bobines. Les bobines de champ sont alimentées par un redresseur connecté au secteur. Le stator et le rotor ont des noyaux magnétiques en tôle d'acier électrique.
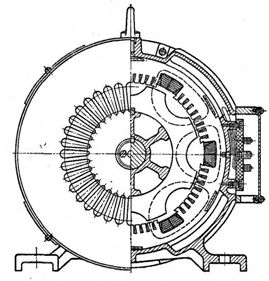
Riz. 4. Générateur à induction haute fréquence
Les générateurs avec la conception décrite sont produits pour une puissance nominale de 1 à 3 kW et des fréquences de 300 à 2400 Hz. Les générateurs sont entraînés par des moteurs asynchrones avec une vitesse synchrone de 3000 tr/min.
Les générateurs à induction à fréquence accrue commencent à être remplacés par des convertisseurs à semi-conducteurs (thyristors). Dans ce cas, ils offrent généralement la possibilité de modifier la fréquence du courant et donc la possibilité de régler la vitesse de rotation du moteur électrique. Si pendant une telle régulation la tension est maintenue constante, alors une régulation de puissance constante est effectuée. Si le rapport tension/fréquence du courant (et donc le flux magnétique du moteur) est maintenu constant, alors la régulation s'effectue avec un couple admissible constant à toutes les vitesses pendant une longue durée.
Les avantages des entraînements avec un convertisseur de fréquence à thyristor et un moteur asynchrone à cage d'écureuil sont un rendement élevé et une facilité d'utilisation. L'inconvénient reste le prix élevé.En génie mécanique, il est recommandé d'utiliser un tel variateur pour les moteurs haute fréquence. Des lecteurs expérimentaux de ce type ont été créés dans notre pays.
Les moteurs asynchrones biphasés de faible puissance sont souvent utilisés dans les entraînements exécutifs des machines-outils. Le stator d'un tel moteur comporte deux enroulements: l'enroulement de champ 1 et l'enroulement de commande 2 (Fig. 5, a). Le rotor 4 dans une cage d'écureuil a une grande résistance active. Les axes des bobines sont perpendiculaires entre eux.
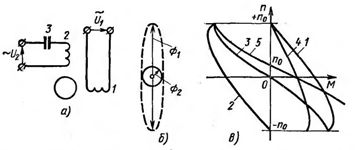
Riz. 5. Schéma d'un moteur à induction biphasé et ses caractéristiques
Les tensions Ul et U2 sont appliquées aux bobinages. Lorsque le condensateur 3 est connecté au circuit de la bobine 2, le courant qu'il contient dépasse le courant dans la bobine 1. Dans ce cas, un champ magnétique elliptique tournant se forme et le rotor 4 de l'écureuil commence à tourner. Si vous réduisez la tension U2, le courant dans la bobine 2 diminuera également. Cela entraînera une modification de la forme de l'ellipse du champ magnétique tournant, qui devient de plus en plus allongée (Fig. 5, b).
Un moteur à champ elliptique peut être considéré comme deux moteurs sur un arbre, l'un fonctionnant avec un champ pulsé F1 et l'autre avec un champ circulaire F2. Le moteur à champ pulsé F1 peut être considéré comme deux moteurs à induction à champ circulaire identiques câblés pour tourner dans des directions opposées.
En figue. 5, c montre les caractéristiques mécaniques 1 et 2 d'un moteur à induction avec un champ tournant circulaire et une résistance active importante du rotor lors de la rotation dans des sens différents. La caractéristique mécanique 3 d'un moteur monophasé peut être construite en soustrayant les moments M des caractéristiques 1 et 2 pour chaque valeur de n.A toute valeur de n, le couple d'un moteur monophasé à forte résistance rotorique est arrêté. La caractéristique mécanique du moteur à champ circulaire est représentée par la courbe 4.
La caractéristique mécanique 5 d'un moteur biphasé peut être construite en soustrayant les moments M des caractéristiques 3 et 4 à n'importe quelle valeur de n. La valeur de n0 est la vitesse de rotation d'un moteur asynchrone biphasé au ralenti idéal. En ajustant le courant d'alimentation de la bobine 2 (Fig. 5, a), il est possible de modifier la pente de la caractéristique 4 (Fig. 5, c), et donc la valeur de n0. De cette manière, le contrôle de la vitesse d'un moteur à induction biphasé est effectué.
Lors d'un fonctionnement avec des valeurs de glissement élevées, les pertes dans le rotor deviennent assez importantes. Pour cette raison, la régulation considérée n'est utilisée que pour les entraînements auxiliaires de faible puissance. Pour réduire le temps d'accélération et de décélération, des moteurs à induction biphasés à rotor creux sont utilisés. Dans un tel moteur, le rotor est un cylindre creux en aluminium à paroi mince.