Entraînement électrique des palans électriques et des poutres de grue
 Les chariots électriques suspendus (palans électrifiés, palans et palonniers) sont utilisés pour soulever et déplacer des charges et des pièces de machines lors de travaux de montage et de réparation dans des locaux industriels. Les palans électriques, les palans et les grues sont plus petits que les ponts roulants, ce qui réduit la taille des bâtiments industriels et leur maintenance ne nécessite pas de personnel qualifié.
Les chariots électriques suspendus (palans électrifiés, palans et palonniers) sont utilisés pour soulever et déplacer des charges et des pièces de machines lors de travaux de montage et de réparation dans des locaux industriels. Les palans électriques, les palans et les grues sont plus petits que les ponts roulants, ce qui réduit la taille des bâtiments industriels et leur maintenance ne nécessite pas de personnel qualifié.
Les chariots électriques suspendus sont conçus pour soulever et déplacer des marchandises dans des installations de production le long d'un chemin strictement défini.
Un chariot électrique (Fig. 1) se compose de 3 parties principales : un mécanisme de levage (palan électrique) conçu pour soulever (abaisser) et maintenir la charge, un mécanisme de déplacement (train de roulement) conçu pour déplacer la charge levée dans une direction de position strictement définie , un monorail qui définit un mouvement horizontal dans deux directions.
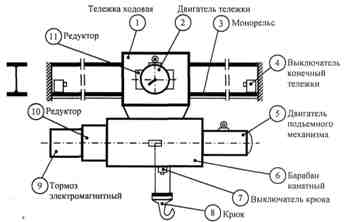
Riz. 1. Schéma cinématique du chariot électrique suspendu
Le palan électrique est monté sur un chariot de travail et comprend les équipements suivants : moteur électrique (5) du mécanisme de levage, réducteur cylindrique (10) pour réduire la vitesse de rotation du moteur électrique à une valeur qui fournit une vitesse linéaire donnée de levage (abaissement) du crochet, frein électromagnétique (9), pour arrêter le moteur de l'arbre lorsqu'il est déconnecté du secteur ou que la tension disparaît dans le réseau, un frein de freinage est activé, agissant sur la force des ressorts, lorsque les arbres sont enroulés autour de l'arbre, le fin de course (7) du crochet, pour limiter la levée du crochet, lorsqu'il est pressé, le moteur est déconnecté du réseau et ralentit, le tambour à câble (6), pour l'enroulement ( dévidage) et stockage de la corde, le crochet (8), pour l'arrimage de la charge soulevée .
Le train de roulement est monté sur le monorail (3), soutenu par les roues de roulement sur les ailes inférieures du double rail. Entraînement des roues à travers une boîte de vitesses cylindrique (11) par un moteur électrique (2).
Monorail — poutre en I avec interrupteurs de fin de course (4) aux extrémités pour limiter le mouvement horizontal.
Le palan électrique TEP-1 (capacité de charge 1 t, tension 380 V) se compose de mécanismes de levage et de déplacement avec entraînements électriques individuels. Le tambour de travail 2 est entraîné par le moteur 20 par l'intermédiaire d'un réducteur planétaire composé de satellites 5, 7, 8, d'engrenages blocs 13, de pignons solaires 6, 9, de support 14, 15. L'arbre d'entraînement principal 4 lorsque le moteur est éteint est arrêté par les disques 10 sous l'action du ressort 11.
Pour entraîner le mécanisme de levage à une vitesse de 6,5 à 6,9 m / s, un moteur asynchrone à glissement accru de type AOS-32-4M est utilisé (puissance 1,4 kW à 1320 tr / min et rapport cyclique = 25%).Le mouvement vers le haut du crochet est limité par un interrupteur de fin de course.
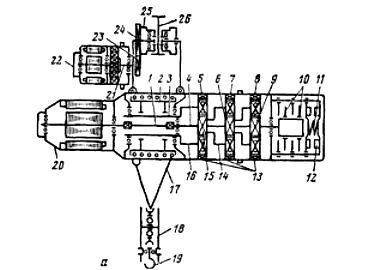
Riz. 2. Entraînement électrique du palan électrique TEP -1 : 1 — tambour de travail, 3 — arbre creux, 4 — arbre de travail, 5, 7, 8 — satellites, 6, 9, 15 — engrenages solaires, 10 — disques de frein, 11 — ressort de frein, 12 — électroaimants, 13 — engrenages de bloc, 14, 16, 21 — supports, 17 — câble, 18 — suspension, 19 — crochet, 20 — moteur électrique pour soulever la charge, 22 — moteur électrique du chariot, 23, 24 — engrenages, 25 — rouleau, 26 — monorail.
La figure 3 montre le fonctionnement du palan. L'efficacité du palan électrique augmente à 0,58 lorsque la masse de la charge soulevée augmente à 1000 kg.
Mode de fonctionnement intéressant du moteur 4 lors de la descente de la charge : tant que le poids de la charge est inférieur à 425 kg, le moteur électrique fonctionne en mode moteur, et lorsque la masse dépasse 425 kg — en mode générateur. Par conséquent, pour surmonter le moment d'inactivité du mécanisme de levage, une charge pesant 425 kg est suffisante.
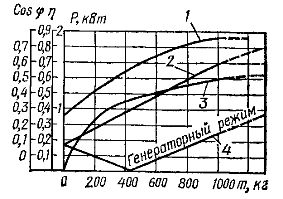
Riz. 3. Caractéristiques de fonctionnement d'un palan électrique: 1 - ssphi du moteur électrique, 2 - la puissance du moteur électrique lors du levage de la charge, 3 - l'efficacité, 4 - la puissance du moteur électrique lors de l'abaissement de la charge.
Pour entraîner le train de roulement du palan électrique, un moteur électrique asynchrone 22 (Fig. 2) de type TEM-0,25 (puissance 0,25 kW à 1410 tr/min et rapport cyclique = 25%) avec un réducteur planétaire à un étage intégré et engrenage 23, 24, transmettant la rotation des galets 25. Les dispositifs de freinage ne sont pas montés sur les mécanismes de déplacement des palans les plus simples. Le mouvement du palan le long de la poutre dans les deux sens est limité par des butées mécaniques.
 Une potence se distingue d'un palan par le fait que la poutre sur laquelle se déplace le palan peut se déplacer dans la salle de production, entraînée par un moteur électrique à cage d'écureuil ou à rotor phasé. Le pont à poutres de grue, doté d'un mécanisme d'entraînement électrique, est réalisé sous la forme d'une poutre unique sur laquelle se déplace le train de roulement électrique.
Une potence se distingue d'un palan par le fait que la poutre sur laquelle se déplace le palan peut se déplacer dans la salle de production, entraînée par un moteur électrique à cage d'écureuil ou à rotor phasé. Le pont à poutres de grue, doté d'un mécanisme d'entraînement électrique, est réalisé sous la forme d'une poutre unique sur laquelle se déplace le train de roulement électrique.
Les moteurs asynchrones triphasés à rotor à cage d'écureuil sont utilisés pour entraîner des voitures électriques hors-bord et uniquement avec une capacité de charge élevée et la nécessité d'une régulation de la vitesse et d'un "atterrissage" en douceur des charges-moteurs asynchrones à rotor de phase.
En raison du manque de faible vitesse nécessaire pour un atterrissage en douceur des charges ou un arrêt précis de la grue, le travailleur doit périodiquement allumer et éteindre les moteurs électriques, ce qui augmente le nombre de démarrages et provoque un échauffement des enroulements, et réduit également le résistance à l'usure des contacts. Par conséquent, sur certaines grues, il existe des entraînements électriques pour le levage et le déplacement à deux vitesses de fonctionnement: nominale et réduite, qui sont fournies en utilisant des moteurs asynchrones à deux vitesses au lieu d'une vitesse unique ou d'un micro-entraînement supplémentaire.
 Les chariots électriques suspendus à basse vitesse (0,2 - 0,5 m / s) alimentés par des moteurs à cage d'écureuil sont généralement contrôlés depuis le sol (sol) à l'aide de chariots suspendus stations de bouton poussoir… Dans les chariots pneumatiques et les grues avec cabine pour l'opérateur (à une vitesse de 0,8 à 1,5 m / s), les moteurs à rotor de phase sont contrôlés par des contrôleurs.
Les chariots électriques suspendus à basse vitesse (0,2 - 0,5 m / s) alimentés par des moteurs à cage d'écureuil sont généralement contrôlés depuis le sol (sol) à l'aide de chariots suspendus stations de bouton poussoir… Dans les chariots pneumatiques et les grues avec cabine pour l'opérateur (à une vitesse de 0,8 à 1,5 m / s), les moteurs à rotor de phase sont contrôlés par des contrôleurs.
Les moteurs électriques des palans et des ponts roulants sont commandés par démarreurs magnétiques réversibles et des boutons de démarrage suspendus à un câble souple armé.La tension aux bobines et aux contacts des contacteurs pour élever KM1 (Fig. 4), abaisser KM2, déplacer KMZ vers l'avant et vers l'arrière KM4 est fournie par un disjoncteur et un câble ou des fils de contact. Le mouvement vers le haut du dispositif de levage est limité par un interrupteur de fin de course. SQ.
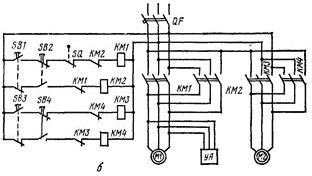
Riz. 4. Schéma électrique de la poutre de grue
Le blocage des contacteurs inverseurs des moteurs à la mise sous tension simultanée est effectué au moyen de boutons à double circuit et d'un blocage mécanique des contacteurs eux-mêmes (ou de l'ouverture des contacts auxiliaires des contacteurs).
Sur les palans électriques et les ponts roulants, les boutons de démarrage ne sont pas contournés par les contacts de verrouillage du contacteur de fermeture correspondants, ce qui empêche le palan de continuer à fonctionner après que l'opérateur a relâché la station pendante à bouton-poussoir. En même temps que le moteur de levage, l'électroaimant UA est actionné, ce qui ouvre le frein.
Le temps de démarrage maximal autorisé pour les mécanismes de levage est de 3 à 5 s, pour les mécanismes de mouvement - 10 à 15 s.
Vous pouvez également voir : Matériel électrique et chaînes de palans électriques
Le mode de fonctionnement des moteurs des chariots électriques, des palans électriques et des ponts roulants dépend de leur destination. Si les marchandises sont déplacées sur des ponts roulants sur de courtes distances, les moteurs fonctionnent dans un mode honteux à court terme (par exemple, dans des chariots desservant des sections d'ateliers ou d'entrepôts).

Pour les ponts roulants transportant des marchandises sur le territoire de l'usine sur des distances relativement importantes, les modes de fonctionnement des moteurs de levage et de déplacement sont différents : le premier se caractérise par un mode à court terme, le second par un à long terme. des moteurs de levage et de déplacement des palans électriques, des palans et des portiques est déterminée de la même manière que pour les moteurs des mécanismes de ponts roulants.