Paramètres de base et caractéristiques des relais électromagnétiques
 Un appareil électrique qui applique la loi de commande de relais est appelé un relais... Dans un relais, lorsque le paramètre de commande (entrée) est modifié en douceur à une certaine valeur définie, le paramètre contrôlé (sortie) change brusquement. Aussi, au moins un de ces paramètres doit être électrique.
Un appareil électrique qui applique la loi de commande de relais est appelé un relais... Dans un relais, lorsque le paramètre de commande (entrée) est modifié en douceur à une certaine valeur définie, le paramètre contrôlé (sortie) change brusquement. Aussi, au moins un de ces paramètres doit être électrique.
Action des organes fonctionnels relais électromagnétique peut être tracé selon le schéma de la fig. 1. Le corps récepteur A convertit la valeur d'entrée (tension) Uin fournie à la bobine 2 du circuit magnétique 1 en une valeur intermédiaire, c'est-à-dire dans la force mécanique de l'ancre 3. La force mécanique de l'ancre FЯ agit sur le système de contact de l'organe exécutif B. La valeur intermédiaire - la force de l'ancre FЯ, est proportionnelle à la valeur d'entrée Uin, est comparée à a valeur donnée de la force Fpr développée par le ressort 9 du corps intermédiaire B. Quand Uin < Uav, Fya
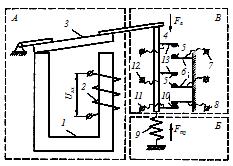 Riz. 1 Schéma du relais électromagnétique
Riz. 1 Schéma du relais électromagnétique
En cours de fonctionnement, le relais électromagnétique sur une échelle de temps distingue quatre phases: la période (temps) d'actionnement tav, la période de travail twork, la période (temps) d'arrêt toff, la période (temps) de repos tp (Fig. . 2).
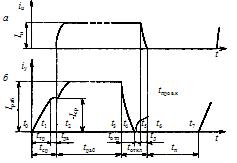
Riz. 2. Dépendance des quantités de sortie (a) et de sortie (b) au temps
Période d'actionnement d'un relais électromagnétique
 La période de réponse comprend l'intervalle de temps à partir du moment où le signal d'entrée commence à affecter l'organe de surveillance jusqu'à ce que le signal apparaisse dans le circuit commandé. Le segment de l'axe des abscisses tav = t2 –t0 correspond à cette période sur la fig. 2, b. A l'instant t0 le courant dans la bobine du relais augmente jusqu'à une valeur à laquelle la force électromagnétique Fe agissant sur l'armature commence à s'opposer à la force du ressort Fm (force mécanique) du corps intermédiaire. La valeur d'entrée est alors appelée la valeur d'acceptation.
La période de réponse comprend l'intervalle de temps à partir du moment où le signal d'entrée commence à affecter l'organe de surveillance jusqu'à ce que le signal apparaisse dans le circuit commandé. Le segment de l'axe des abscisses tav = t2 –t0 correspond à cette période sur la fig. 2, b. A l'instant t0 le courant dans la bobine du relais augmente jusqu'à une valeur à laquelle la force électromagnétique Fe agissant sur l'armature commence à s'opposer à la force du ressort Fm (force mécanique) du corps intermédiaire. La valeur d'entrée est alors appelée la valeur d'acceptation.
La période initiale correspond au segment ttr = t1 — t0. A l'instant t1, l'armature de l'électroaimant du relais commence à bouger. Pendant tdv = t2 - t1, l'ancre se déplace, surmontant la résistance du corps intermédiaire B (voir Fig. 1) et activant le corps exécutif C.
À la fin de la course de l'induit, les contacts d'entraînement se ferment, le courant de charge dans (Fig. 2, a) commence à augmenter de zéro à une valeur d'équilibre. La valeur d'entrée à laquelle commence la commande du circuit de sortie est appelée valeur d'acceptation (Iav). La puissance Psr correspondant à Isr est appelée puissance d'actionnement.
Temps de réponse t cf = ttr + tdv.
Le temps de réponse des relais électromagnétiques varie de 1-2 à 20 ms. Les relais temporisés électromagnétiques offrent un retard pouvant atteindre 10 s.
Pour estimer le temps de réponse du relais, il est permis d'utiliser l'expression
t cf = t1kz-bm –a,
où t1 est le temps de réponse pour un facteur de sécurité donné ks et un facteur m = 1 ; a, b — coefficients déterminés en fonction du type de relais et des valeurs de kz et m.
Pour les relais rapides à kz = 1,5¸2, la valeur du coefficient a se rapproche de l'unité. Pour les relais ordinaires avec k z = 1,5¸3, la valeur a = 0,25¸0,95, la valeur du coefficient b est généralement comprise entre 1,4 et 1,6.
Durée de fonctionnement du relais électromagnétique
 La période de travail comprend l'intervalle de temps twork = t3 — t2, c'est-à-dire le temps depuis le moment de la commande du circuit de sortie t2 jusqu'au moment de la fin de l'impact sur l'organe sensible du signal d'entrée t3. Le courant commence à monter jusqu'à une valeur stationnaire de Iwork (Fig. 2, b) - il s'agit de la valeur de travail de la valeur d'entrée, qui garantit un fonctionnement fiable du relais.
La période de travail comprend l'intervalle de temps twork = t3 — t2, c'est-à-dire le temps depuis le moment de la commande du circuit de sortie t2 jusqu'au moment de la fin de l'impact sur l'organe sensible du signal d'entrée t3. Le courant commence à monter jusqu'à une valeur stationnaire de Iwork (Fig. 2, b) - il s'agit de la valeur de travail de la valeur d'entrée, qui garantit un fonctionnement fiable du relais.
Le rapport Iwork / Icr = kz est appelé facteur de sécurité au travail.
Pour caractériser la capacité de surcharge de l'élément sensible du relais, on utilise la valeur de la grandeur d'entrée, appelée valeur limite de la grandeur de fonctionnement Ifonctionnement.max.
Limitation de la valeur de travail - c'est sa valeur que l'organe sensible peut supporter pendant une courte période de temps normalisée. Cependant, la valeur de cette valeur est inacceptable lorsque le relais fonctionne en mode normal en raison de la condition de résistance électrique ou mécanique ou d'échauffement.
Le concept de puissance de commande Ru est utilisé pour caractériser la capacité de charge de la commande de relais. La puissance de commande est la puissance dans le circuit commandé que le variateur peut transmettre pendant une longue période.
Période de déclenchement du relais électromagnétique
 La période d'arrêt contient l'intervalle de temps toff = t6 — t3, c'est-à-dire le temps entre le moment de la cessation de l'impact sur l'organe de perception t3 et le moment où le courant dans le circuit contrôlé diminue à zéro (Fig. 16, a).
La période d'arrêt contient l'intervalle de temps toff = t6 — t3, c'est-à-dire le temps entre le moment de la cessation de l'impact sur l'organe de perception t3 et le moment où le courant dans le circuit contrôlé diminue à zéro (Fig. 16, a).
La période d'arrêt comprend la période de relâchement totp = t4 — t3 pendant laquelle le relais est éteint. Le courant iy dans la bobine de relais tombe à zéro (Fig. 2, b). Pendant cette période, la force du ressort opposé (force mécanique) dépasse la force électromagnétique, c'est-à-dire Fm > Fe et l'armature est libérée.
Après avoir sélectionné une défaillance de contact (intervalle tc = t5 — t4), les contacts du relais s'ouvrent et un arc est allumé entre eux, qui s'éteint après le temps td = t6 — t5. Pendant la période td, le courant dans le circuit commandé diminue de In à zéro (Fig. 2, a).
Temps d'arrêt t t = tp + tc + td.
La période de déclenchement est caractérisée par un facteur de rétablissement, qui est le rapport du courant de chute Iotp au courant d'appel Iav : kv = Iotp / Icr.
En règle générale, pour les relais de protection du système d'alimentation et les relais de contrôle qui contrôlent le paramètre d'entrée dans des limites étroites, kv doit être plus proche de l'unité.
Période de repos du relais électromagnétique
La période de repos est l'intervalle de temps tp = t7 — t6.
La période de latence est caractérisée par un paramètre appelé valeur inopérante, qui est la plus grande valeur de la grandeur d'entrée assurant que le relais ne fonctionne pas ou est maintenu. Le temps d'arrêt est inférieur au temps de démarrage de fonctionnement et au temps de relâchement.
Le rapport entre la puissance de commande et la puissance d'actionnement est appelé gain, ku = Py / Pcr.
Le nombre de démarrages par unité de temps est déterminé par une valeur inversement proportionnelle au temps de cycle :
f = 1 / tq = 1 / (Tsrab +Trob + Toff +TNS)
Lakota O.B.