Qu'est-ce qu'un transformateur différentiel linéaire
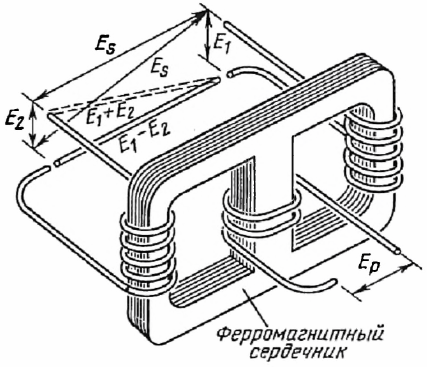
Un courant alternatif circulant dans une bobine primaire peut être utilisé pour induire une tension alternative dans deux bobines secondaires. Si les deux enroulements secondaires sont identiques dans leurs caractéristiques et que les deux trajets des lignes de champ magnétique traversant ces bobines sont également identiques, alors les deux tensions secondaires générées seront égales. Un appareil avec cette structure s'appelle un transformateur différentiel.

Un transformateur différentiel peut avoir un noyau à air ou un noyau magnétique.
Deux enroulements secondaires peuvent être connectés soit en phase soit en antiphase, dans le premier cas leurs tensions s'additionnent et dans le second cas l'une se soustrait à l'autre.
Un enroulement primaire est utilisé pour piloter deux enroulements secondaires symétriques, ces derniers pouvant être connectés de sorte que les tensions secondaires s'ajoutent ou se soustraient l'une à l'autre.
Si deux bobines sont connectées selon un schéma de soustraction, alors aux mêmes valeurs de leurs tensions, la tension secondaire totale sera nulle.Si les caractéristiques du circuit magnétique de l'une de ces bobines sont intentionnellement modifiées par rapport aux caractéristiques du circuit magnétique de l'autre bobine, alors les deux tensions secondaires seront différentes et leur différence ne sera pas nulle.
Dans ces conditions, la phase de la tension secondaire totale indique quel chemin des lignes de champ magnétique présente la plus grande résistance, tandis que l'amplitude de cette tension reflète la valeur de la différence de réluctance.
Si la même action est utilisée pour augmenter la résistance magnétique d'un chemin et pour diminuer la résistance magnétique de l'autre chemin, alors la tension de sortie reflétant cette action atteint sa valeur maximale, et la fonction de transfert aura la plus grande linéarité possible.
Étant donné qu'il n'est pas possible de rendre exactement identiques deux enroulements secondaires et deux chemins de lignes de champ magnétique, un transformateur différentiel a toujours une tension de sortie définie, même avec un signal utile nul à l'entrée.
De plus, les caractéristiques des circuits magnétiques sont non linéaires. En raison de cette non-linéarité, même des composantes harmoniques de la fréquence fondamentale de la tension d'excitation primaire appliquée apparaissent, qui ne peuvent être entièrement compensées dans aucun agencement des enroulements secondaires.
La réluctance d'un circuit ferromagnétique à entrefer est fonction de la largeur de l'entrefer avec une forte non linéarité. Par conséquent, l'inductance d'une bobine enroulée autour d'un tel circuit est également une fonction non linéaire de la largeur de l'entrefer.
En même temps, s'il y a deux trajets plus ou moins identiques des lignes de champ magnétique, chacun avec un entrefer, et si la largeur d'un entrefer augmente à mesure que la largeur de l'autre diminue, alors la différence de résistance magnétique de ces les trajectoires peuvent varier suffisamment linéairement.
Les principes de base du transformateur différentiel sont mis en pratique dans une variété de configurations de conception spécifiques à de nombreuses fins différentes.
Transformateur différentiel variable linéaire (LVDT) est un transducteur passif (capteur) qui fonctionne sur le principe de l'induction mutuelle et peut être utilisé pour mesurer le déplacement, la contrainte, la pression et le poids.
Le plus souvent, ils utilisent NS pour mesurer le déplacement dans la plage de plusieurs millimètres à centimètres, convertissant directement le déplacement I'm en un signal électrique.
L'inductance de la bobine à proximité ou à l'intérieur de laquelle se trouve le barreau ferromagnétique est fonction de la coordonnée de la position de ce barreau par rapport à la bobine à forte non linéarité.
Si une telle tige est un circuit ferromagnétique d'un transformateur différentiel, la tension différentielle secondaire peut alors servir d'indicateur du déplacement de la tige, en fonction de manière suffisamment linéaire de ce déplacement.
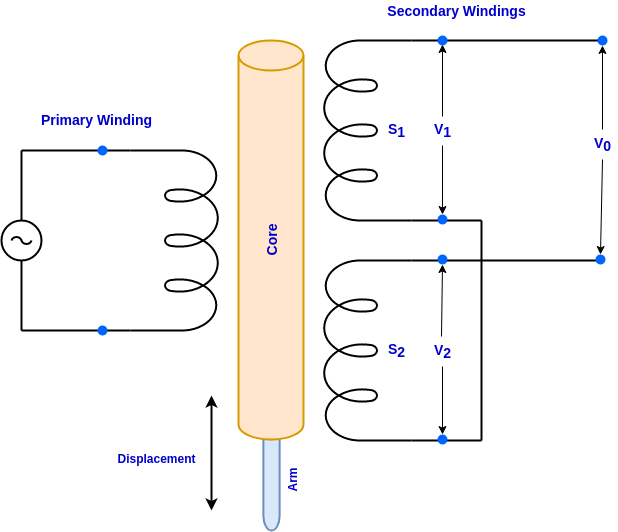
L'enroulement primaire est connecté à une source de courant alternatif. Les deux enroulements secondaires S1 et S2 ont un nombre de spires égal et sont montés en série en face l'un de l'autre.
Ainsi, la FEM induite dans ces enroulements est déphasée de 180° l'une par rapport à l'autre et ainsi l'effet global s'annule.

La position du noyau ferromagnétique symétrique prévue dans la conception du transformateur différentiel peut être déterminée à partir de la phase et de l'amplitude de la tension secondaire.
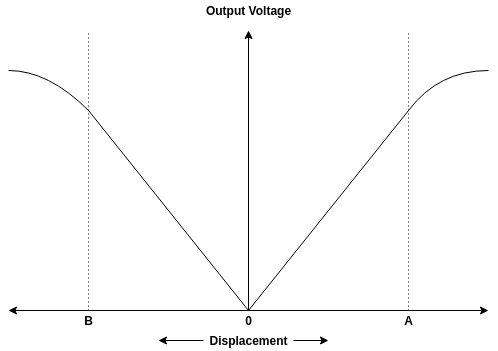
La différence absolue entre les deux tensions secondaires indique la valeur absolue du déplacement de la tige par rapport au centre ou position zéro, et la phase de cette tension différente indique le sens du déplacement.
La courbe B / I d'un transformateur différentiel variable linéaire est représentée sur la figure.
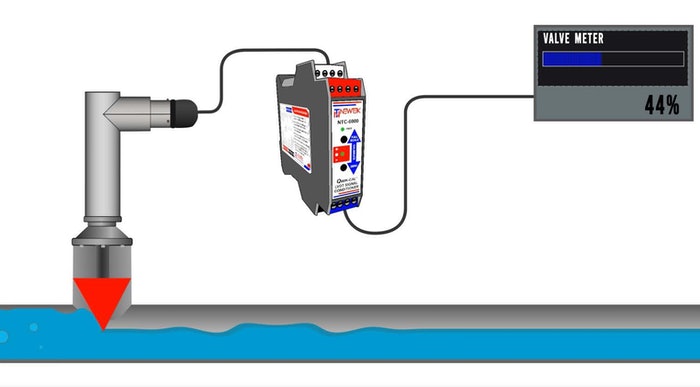
Exemple d'utilisation d'un transformateur différentiel linéaire pour fournir un retour de position précis pour la surveillance et le contrôle des vannes dans les usines chimiques, les centrales électriques et les équipements agricoles :
Capteurs de déplacement submersibles LVDT D5W :
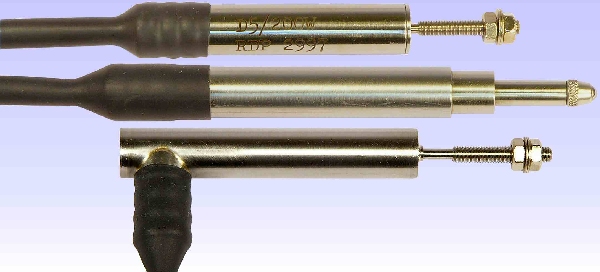
Ces transducteurs sont conçus pour mesurer le déplacement et la position. Ils fournissent une mesure précise de la position de l'armature (partie coulissante) par rapport au boîtier du capteur de déplacement.
Les transducteurs de déplacement submersibles sont conçus pour prendre des mesures tout en étant immergés dans des liquides appropriés. Les liquides non magnétiques peuvent inonder le tube d'induit sans affecter le fonctionnement du convertisseur. Ces convertisseurs sont disponibles en version non contrôlée ou à rappel par ressort.
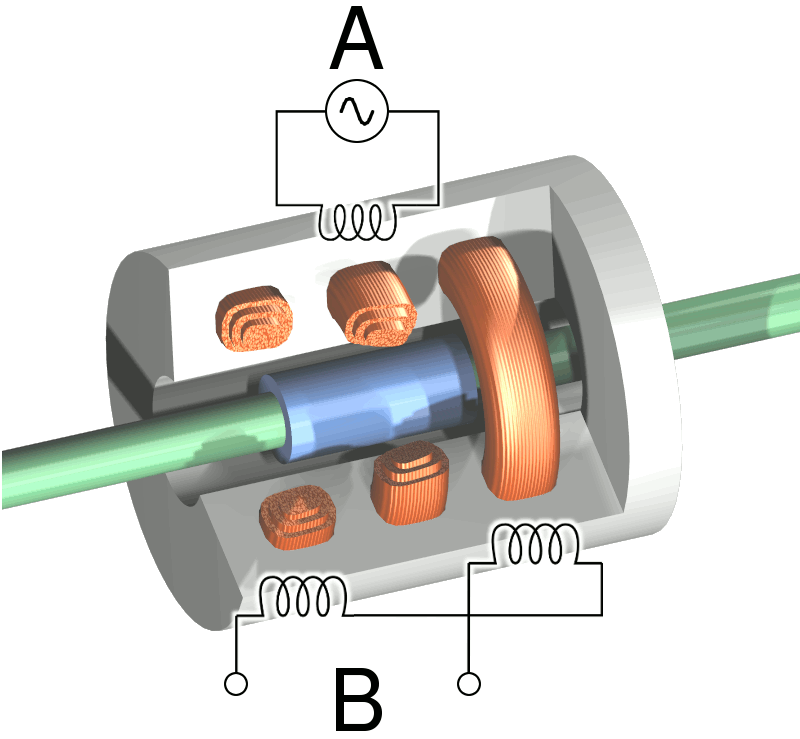
Lors de l'automatisation de divers processus technologiques, des convertisseurs bilatéraux avec un transformateur différentiel à noyau ferromagnétique, qui est inséré à ses extrémités à égale distance dans les deux bobines secondaires, sont souvent utilisés.
Lorsque la tige se déplace axialement, elle se déplace plus profondément dans l'une de ces bobines et s'étend de l'autre.La différence absolue entre les deux tensions secondaires indique la valeur absolue du déplacement de la tige par rapport au centre ou position zéro, et la phase de cette tension différente indique le sens du déplacement.
Transformateur différentiel AC rotatif :
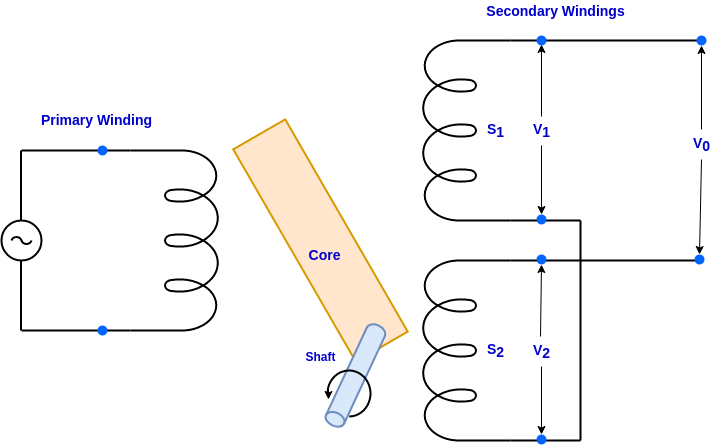
Un transformateur différentiel variable rotatif est un transformateur passif basé sur le principe de l'induction mutuelle. Il est utilisé pour mesurer le déplacement angulaire.
Sa conception est similaire à celle d'un transformateur différentiel variable linéaire, à l'exception de la construction du noyau.
L'enroulement primaire est connecté à une source de courant alternatif. Les deux enroulements secondaires S1 et S2 ont un nombre de spires égal et sont montés en série en face l'un de l'autre.
Avantages du transformateur différentiel linéaire :
-
Il n'y a pas de contact physique entre le noyau et les bobines ;
- Grande fiabilité;
-
Réponse rapide;
-
Longue durée de vie.
C'est le capteur inductif le plus utilisé en raison de sa grande précision.