Equipement électrique des ascenseurs
 Un ascenseur est une machine de levage cyclique conçue pour le levage vertical de personnes et de marchandises. Sur rendez-vous, les ascenseurs sont divisés en passagers, fret-passagers, hôpital, fret.
Un ascenseur est une machine de levage cyclique conçue pour le levage vertical de personnes et de marchandises. Sur rendez-vous, les ascenseurs sont divisés en passagers, fret-passagers, hôpital, fret.
En fonction de la vitesse de la cabine, les ascenseurs sont divisés en basse vitesse (jusqu'à 0,71 m/sec), grande vitesse (de 1 à 1,6 m/sec), grande vitesse (de 2 à 4 m/sec) et à grande vitesse (4 - 10 m / s) ... La capacité de charge des ascenseurs pour passagers est de 320 à 1600 kg, les monte-charges - de 160 à 5000 kg. À une vitesse pouvant atteindre 1,6 m / s, le moteur électrique est connecté à la poutre de traction via une boîte de vitesses. Si la vitesse est supérieure, des entraînements électriques sans engrenage sont utilisés.

Avec une grande variété d'options de conception pour les ascenseurs de passagers et de fret, les principaux dispositifs pour eux sont le palan, les câbles, la cabine, le contrepoids, le frein mécanique et l'équipement de contrôle. Les ascenseurs modernes ont un système de suspension à contrepoids et une corde de contrepoids.

La cabine se déplace le long de rails verticaux.La cabine est suspendue aux câbles qui entourent le câble de remorquage et guident les poulies de l'entraînement du treuil électrique. Aux extrémités de la corde se trouve un contrepoids qui se déplace le long des guides. La masse du contrepoids est égale à la somme de la masse de la cabine et (0,42 — 0,5) de la masse de la charge (ou de la moitié de la charge la plus probable de la cabine).
Entraînements d'ascenseur
Dans les ascenseurs et les monte-charges, les types d'entraînements électriques sont sélectionnés en fonction de la vitesse de déplacement, du nombre d'étages du bâtiment et de la précision de freinage requise. Les entraînements électriques suivants sont actuellement utilisés :
a) pour les bâtiments jusqu'à 17 étages, des ascenseurs à basse vitesse et à grande vitesse avec une vitesse de 0,7 à 1,4 m / s avec une capacité de charge de 320 400 kg sont utilisés. Ces ascenseurs utilisent un entraînement électrique avec un moteur électrique asynchrone à deux vitesses avec un rotor dans une cage d'écureuil,
b) pour les ascenseurs à grande vitesse avec une vitesse de 1,6 m / s, destinés aux bâtiments jusqu'à 25 étages, un entraînement électrique selon le système de régulateur de tension à thyristors (TRN) avec un moteur asynchrone à deux vitesses (TRN-ADD ) est utilisé.

La présence d'un entraînement électrique réglable assure une grande fluidité des processus d'accélération et de décélération, une grande précision d'arrêt au sol (jusqu'à 20 mm) et l'absence de section à vitesse réduite avant l'arrêt. Le deuxième enroulement du moteur est utilisé pour atteindre une faible vitesse lors de la révision,
c) pour les ascenseurs à grande vitesse et à grande vitesse, des entraînements électriques constants selon le système de moteur du convertisseur à thyristor-TP-D et du courant alternatif selon le système de convertisseur de fréquence-moteur électrique asynchrone à court-circuit GGCH-AD sont utilisés.
Entraînement électrique à thyristor d'ascenseur type ULMP-25-16
L'alimentation de l'entraînement électrique (Fig. 1) est réalisée par un régulateur de tension à thyristor réversible UZ (TRN) au démarrage et au mouvement uniforme et par un redresseur séparé monté selon un montage en pont monophasé UZ1 pour alimenter le enroulement du stator lors d'un freinage dynamique.
Le système fournit un contrôle de phase paramétrique de la vitesse de rotation d'un moteur à induction à cage d'écureuil. Le système de contrôle automatique est réalisé sur un micro-ordinateur monopuce de type KR1816VB031, qui effectue un contrôle numérique direct de la vitesse de rotation d'un moteur électrique asynchrone à deux vitesses.
Le système de contrôle automatique assure une grande précision de maintien de la vitesse de consigne et d'arrêt au niveau de l'étage requis directement au point de consigne sans section à vitesse réduite. Le deuxième enroulement du moteur n'est allumé que pendant la révision.
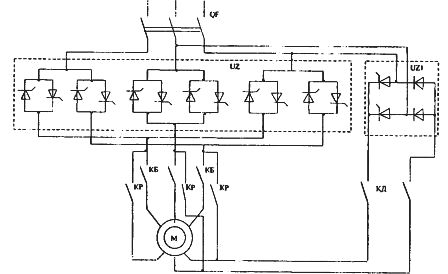
Riz. 1. Schéma de l'entraînement électrique à thyristor de l'ascenseur
Solénoïdes de frein
Les mécanismes de levage des ascenseurs sont équipés de dispositifs de freinage spéciaux avec des électroaimants à courant continu à courte course et à courte course, qui sont connectés à un réseau 220 ou 380 V via un redresseur.
Dispositifs de contrôle d'ascenseur
Interrupteurs d'étage conçus pour commuter les circuits de commande de mouvement. Ils enregistrent la position de la voiture, sélectionnent automatiquement le sens de déplacement (« haut » ou « bas ») et donnent l'ordre d'éteindre l'entraînement électrique lors du freinage.Structurellement, il s'agit d'interrupteurs à levier à trois points (1-0-2) à trois positions (dispositifs de commande de mouvement) ayant des contacts mobiles (sur le levier) à fixes (sur le corps).
Les interrupteurs au sol sont montés dans la gaine au niveau du sol et il y a une branche moulée dans la cabine qui agit sur le levier de l'interrupteur au sol.
Lorsque la cabine se déplace "vers le haut" en tournant le levier, un groupe de contacts fixes se ferme et "vers le bas" - un autre. Lorsque la cabine est au niveau de l'étage, l'interrupteur d'étage est en position neutre «O» et les contacts fixes sont ouverts.

Les interrupteurs de vitesse sont conçus pour donner une impulsion pour réduire la vitesse avant d'arrêter le véhicule. Ils sont utilisés dans les ascenseurs à grande vitesse à entraînement électrique avec une exécution à deux vitesses. Ils sont construits sur le principe des interrupteurs d'étage, mais ont une conception différente. Les interrupteurs de vitesse sont installés dans le puits de la mine en tant qu'ensemble complet au-dessus et au-dessous du sol à une distance de 0,5 à 0,6 m.
Les interrupteurs à levier sont conçus pour faire fonctionner les monte-charges contrôlés. Structurellement, il s'agit d'interrupteurs à levier à trois positions avec retour automatique de la poignée en position neutre ("haut" -0- "bas"), montés dans la cabine. En tournant la poignée, le sens du mouvement est sélectionné, ce qui est obtenu en fermant une paire de contacts fixes. Lorsque la poignée est relâchée, les contacts s'ouvrent et le moteur s'arrête (s'éteint). Les interrupteurs sont utilisés simultanément comme interrupteur de fin de course dans les positions finales de la cabine. Ceci est réalisé par l'action du levier sur le rouleau de guides spéciaux dans le puits de la mine.
Capteurs inductifs conçus pour être utilisés dans les ascenseurs à grande vitesse. Le schéma de tels capteurs pour courant alternatif et redressé est illustré à la Fig. 2.
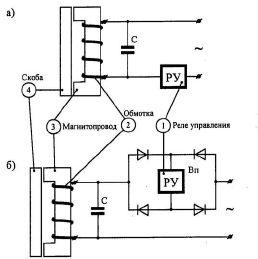
Riz. 2. Schéma de principe des capteurs inductifs à courant alternatif (a) et redressé (b)
Un circuit magnétique stratifié en forme de U en acier 3 est installé dans le puits de mine, et il y a un support en acier 4 sur la cabine, qui est un shunt magnétique. Sur le circuit magnétique, il y a une bobine avec l'enroulement 2, à laquelle le relais de commande 1 est connecté directement ou via un redresseur Vp. Lorsque la pince sort (le circuit magnétique s'ouvre), la résistance inductive de la bobine est faible, ce qui assurera le fonctionnement du relais de commande. Si le support en acier chevauche le circuit magnétique, la résistance inductive de la bobine augmente brusquement et le relais est relâché.
La fiabilité et la clarté de fonctionnement du relais de commande sont assurées par l'inclusion de la capacité C en parallèle avec la bobine, qui est choisie à partir de la condition d'obtention d'un mode proche de la résonance des courants. L'utilisation d'un redresseur pour alimenter le relais de commande augmente la fiabilité du fonctionnement du système magnétique du relais.
De plus, les dispositifs de contact hermétiques (interrupteurs Reed) sont largement utilisés dans les capteurs de déplacement. L'utilisation de capteurs inductifs élimine les inconvénients des interrupteurs d'étage et des interrupteurs de vitesse tels que le bruit et les interférences radio résultant du fonctionnement des dispositifs de contact.
La stratification magnétique est un dispositif électromagnétique installé dans la cabine et contrôlant le fonctionnement des serrures des portes de la mine. Le limiteur de branche magnétique est relié à l'armature de l'électroaimant de branche.Lorsque la cabine est sur le sol, l'électroaimant de branche est désaéré, la détente à ressort désengage le loquet de verrouillage de la porte de la mine, lui permettant de s'ouvrir.
Lors du déplacement, l'électroaimant de la branche est alimenté - le loquet est introduit, ce qui interdit l'ouverture de la porte. De telles serrures sont utilisées dans les ascenseurs de conception ancienne (ou modernisée) à commande manuelle des portes palières.

Automatisation des ascenseurs
La principale différence entre le fonctionnement des ascenseurs et des monte-charges est leur position multi-positions, qui se traduit par le fait que les mécanismes peuvent occuper un grand nombre de positions fixes. Par conséquent, après chaque arrêt, il est nécessaire de résoudre le problème logique du choix du prochain coup. La solution à ce problème est actuellement mise en œuvre à l'aide de puces logiques et de microprocesseurs. Les tâches suivantes sont définies pour le schéma de contrôle de l'ascenseur: contrôle de la position de la cabine dans la cage, sélection automatique du sens de déplacement, détermination de l'heure de début de l'arrêt, arrêt précis de la cabine au sol, ouverture automatique et fermeture des portes et protection des entraînements électriques et de l'ascenseur.
Les signaux de commande qui définissent le programme de mouvement de la voiture sont divisés en deux types : les "ordres" provenant de la voiture et les "appels" provenant de l'aire d'atterrissage. Les commandes sont données via des boutons situés respectivement dans le cockpit et au sol. Selon la réponse aux commandes et les méthodes de leur traitement, les schémas de contrôle séparés et collectifs diffèrent.Avec un principe de commande séparé, le circuit ne perçoit et n'exécute qu'une seule commande et pendant son exécution ne répond pas aux autres commandes et appels.
Ce schéma est le plus simple à mettre en œuvre, mais limite les caractéristiques possibles de l'ascenseur et n'est donc utilisé que pour les ascenseurs des immeubles résidentiels jusqu'à neuf étages avec un flux de passagers relativement faible. Avec le principe du contrôle collectif, le circuit reçoit plusieurs commandes simultanément et les exécute dans une certaine séquence, généralement dans l'ordre des étages.

La base du système de contrôle d'ascenseur est la mesure de l'horloge au sol. L'étude de l'horloge peut être un pendule, lorsque la fixation s'effectue dans deux sens, de bas en haut et de haut en bas, et dans un sens, par exemple, uniquement de haut en bas. Le balancement du pendule est utilisé plus souvent.